| Problem statement Solution video |
DISCUSSION THREAD
NOTE: Please note that you are not asked to solve Part (d) of this problem.
Ask your questions here. Or, answer questions of others here. Either way, you can learn.
DISCUSSION and HINTS
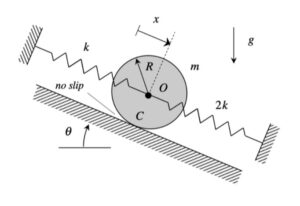
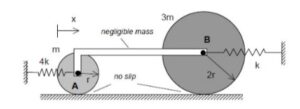
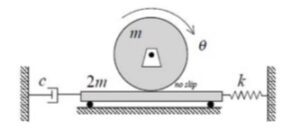
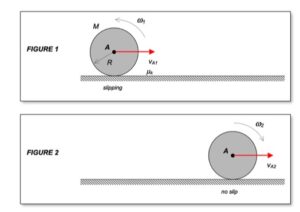
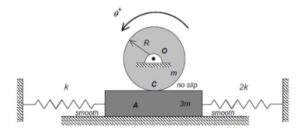
As the system moves, there is no slipping between the contact point C on the drum and block A. This represents a constraint between the drum rotation and the block translation. We will deal with this in Step 3 of the derivation of the equation of motion below.
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
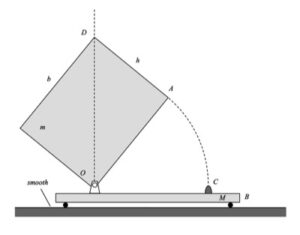
Draw individual free body diagrams (FBDs) of the drum and the disk. Be sure to include the equal-and-opposite contact forces on both the drum and the block. It is important to temporarily define a coordinate that describes the motion of the block. Let’s call that variable “x“, and define it to be positive to the right. With this definition, the spring forces on the left and right side of the block are kx and 2kx, respectively, with both forces pointing to the left.
Step 2: Kinetics (Newton/Euler)
Using your FBDs from above, write down the Euler equation for the drum, and the Newton equation for the block. Combine these two equations through the elimination of the drum-to-block contact force.
Step 3: Kinematics
You need to relate the angular acceleration of the drum to the acceleration of the block. How is this done? What are the results? Also, how do you relate the stretch/compression x in the two springs in terms of θ?
Step 4: EOM
From your equations in Steps 2 and 3, derive the equation of motion (EOM) of the system in terms of θ.
Once you have determined the EOM for the system, identify the natural frequency from the EOM. Also from the EOM, we know that the general form of the response is: θ(t) = C*cos(ωnt)+ S*sin(ωnt). How do you find the response coefficients C and S?