| Problem statement Solution video |
DISCUSSION THREAD
Ask your questions here. Or, answer questions of others here. Either way, you can learn.
DISCUSSION and HINTS
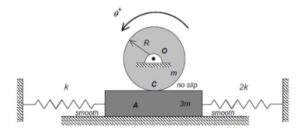
As the system moves, there is no slipping between the contact point C on the drum and block A. This represents a constraint between the drum rotation and the block translation. We will deal with this in Step 3 of the derivation of the equation of motion below.
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
Draw individual free body diagrams (FBDs) of the drum and the disk. Be sure to include the equal-and-opposite contact forces on both the drum and the block. It is important to temporarily define a coordinate that describes the motion of the block. Let's call that variable "x", and define it to be positive to the right. With this definition, the spring forces on the left and right side of the block are kx and 2kx, respectively, with both forces pointing to the left.
Step 2: Kinetics (Newton/Euler)
Using your FBDs from above, write down the Euler equation for the drum, and the Newton equation for the block. Combine these two equations through the elimination of the drum-to-block contact force.
Step 3: Kinematics
You need to relate the angular acceleration of the drum to the acceleration of the block. How is this done? What are the results? Also, how do you relate the stretch/compression x in the two springs in terms of θ?
Step 4: EOM
From your equations in Steps 2 and 3, derive the equation of motion (EOM) of the system in terms of θ.
Once you have determined the EOM for the system, identify the natural frequency from the EOM. Also from the EOM, we know that the general form of the response is: θ(t) = C*cos(ωnt)+ S*sin(ωnt). How do you find the response coefficients C and S?
Would there be an Ox and Oy at the center of the Drum's FBD due to the pin? I am confused because if Oy is considered, then what would the normal force on the drum be if it is already being supported? That being said, I am confused whether to consider or ignore Ox and Oy
I believe there would be an Ox and Oy at the center of the Drum. However, if you take the moment about point O for the Euler equation for the drum, these would not play into the equation as these forces act through point O.
Good question. The pin is supporting the drum, and thus Ox and Oy must be labeled. There could also be a normal force acting up which could be included in the free body diagram as well. However, none of these forces matter since they don't apply any torque. Only friction does.
When finding the natural frequency do we use only the mass of the block or the sum of the masses of the block and drum?
Do not try to determine the natural frequency by simple inspection of the problem. Go through the four-step process to determine the EOM. Let M be the coefficient in front of the theta_ddot term, and K be the coefficient in front of the theta term in this EOM. The natural frequency of the system will then be sqrt(K/M).
The direct answer to your question is: neither one. The "M" coefficient will be some combination of the mass of the block and the mass moment of inertia of the disk. This combination is likely not one that you would figure out from inspection.
When we express the natural frequency in both rad/s and Hz for part c, should we write the natural frequency ω with the units rad/s and then calculate the frequency ƒ and write it with the unit Hz?
That's how I approached it got the w with the units rad/s and then for the frequency divide by 2pi.
The first half of this problem is similar to past problems we have solved except I found it useful to take the moment about O instead of C. Example 6.B.3 is helpful for solving part c and d of this problem.
I'd also recommend looking at example 6.B.5 for part C, since the EOM for that problem is also in terms of theta and its time derivatives.
I used the last homework to solve for parts A and B. Parts C and D are explained in good detail in the Summary: Vibrations - Free Undamped Response pdf located in the Daily Schedule
This problem is remarkably similar to problem H.6.B. I recommend taking the moment about O. Then use your kinematic equations to relate x double dot and theta double dot. substitute back into the kinetics for part B.
Since there is an initial w_0, does that impact the acceleration equation? But when doing that, I end up with a theta_dot^2 term in my EOM.
The w_0 should not impact your EOM. To get the EOM you just need x double dot, so the w_0 should not impact that equation. X double dot would just be the second derivative of the x equation you have. Your w_0 will come into play in the last part of the problem.
When the problem says "When theta = 0 rad the springs are unstretched", does it mean theta at time = 0 s, theta is 0 rad?
Yes. That is the initial condition that will be used to find the coefficients for part D, the solution to the EOM.
Ox and Oy are on a fixed point and have real forces, however being the center of the moment, forces aren't taken into account. Also, note the double spring constant on the right, which will alter your theta dot.
Is the contact force between the drum and the block horizontal or vertical?
On my FBDs, I have a vertical normal force acting between the drum and the block, as well as friction acting equal and opposite horizontally between them. Hope this helps!
There is a vertical normal force and horizontal friction force, however I think only the friction force will be necessary to helping to solve this problem.
In the Euler equation, would the f*R be in the same direction or opposite direction as the I*theta_ddot?
They would be in opposite directions. This is because the force f causes rotation in the negative theta_ddot direction.
The sign on the moment due to friction will depend on two things: the direction in which you drew the friction force (arbitrary) and the sign convention for theta (given). For example:
• If you draw the friction force to the left on the disk, this will create a CW moment about O. Since theta has a positive direction of CCW (given), the moment due to friction is negative.
• If you drew the friction force to the right on the disk, this will create a CCW moment about O. Since theta has a positive direction of CCW (given), the moment due to friction is positive.
The RHS of Euler's equation should always be I_O*alpha regardless of sign conventions and directions of friction forces.
Does this help?
Yes, thank you
I am still confused why it is so important that the forces need to be the opposite sign as the acceleration in the x direction
As discussed in the challenge question on page 394 of the lecture book, it points out that all terms in the EOM equation must be the same sign. So, when summing the forces in the x direction, you must keep in mind that when you bring all forces to one side and equate the terms to zero, the signs all must match. By having the forces in the opposite direction of the acceleration, this ensures a result in which all of the EOM terms are matching.
Another way to think about it is that as the drum rolls ccw (direction of positive theta), the block moves to the right, causing the left spring to be in tension and the right spring to be in compression. The springs want to be back in equilibrium, so the left spring pulls on the block and the right spring pushes on it. These forces both enact to the left (negative x direction)
Is there a correct way to define in which direction each spring is acting?
Given the sign convention of theta, I believe that there is a correct way to define the direction that each spring is acting. If the disk is moving in the positive theta direction, the spring with a constant of 2k would be in compression and the spring with a constant of k would be in tension.
Look back to Step 1 in the given hints. A temporary variable "x" describes the motion of the block, and is defined to be positive to the right. The spring forces on the left and right sides of the block should both be pointing left. Hope this helps!
How exactly does the given positive direction of the angular motion influence the problem? What would happen if we oriented our system to go against that positive angle? Just trying to get a better grasp on this.
The positive direction hypothetically shouldn't matter as long as you note your convention. If say you made the drum rotate cw as positive you would just have to use that notation for your moments (cw positive). You would then also have to take this into account when defining the relationship between the drum and the block. If you still have the translational movement of the block defined as positive to the right, there would be a negative in the relationship. Finally, if you assume the block is rotating cw the direction of friction would be different as friction will always oppose motion.
I believe that the problem notes that as the positive direction because it reflects the motion you would see while the block is moving forward. To my understanding, the directions of motion shouldn't change your final answer as long as you make sure the directions of the resulting forces (spring and friction forces) are correct.
When solving this problem, I took the moment about point O because it is rigid, and you dont have to worry about solving for the reaction forces at O. This makes solving for the EOM a lot easier.
For the natural frequency, following the formula given in the textbook, do we get it in rad/s or hertz?
Wn=sqrt(K/m) will result in rad/s. Dividing this value by 2pi will result in the frequency in Hz.
I'm pretty sure in both? hertz is just Wn/2Pi if I'm not mistaken.... If you are asking what the textbook formula units are, I'm not sure, but natural frequency in rad/s is SQRT(k/m).
Is there a velocity at the no slip contact point? and if so, how do you know which direction is is going in
Does the problem specification of gearing/smooth surface/no slip in the problem statement imply that the drum and block have no slip but also no frication? Or is this a standard no slip interaction as we have analyzed previously?
I believe that in order to have a no slip condition, there must be a force between the drum and block that provides an opposing torque; otherwise, the instantaneous velocity at C will be nonzero with respect to the block. Therefore, this can be treated as a standard no slip problem with a friction force opposing the direction of motion.
Luke,
The relevant aspect of this problem is that there is a no-slip kinematic condition between the motion of the disk and the motion of the block at the contact pointt. The no-slip can be effected by either friction between the two bodies at the contact point, or by the meshing of gears at the contact point.
Simply use that the horizontal components of velocity of the disk and block are equal at the contact point, as well as the horizontal components of acceleration..
I used the previous homework's guides as refreshers for solving the first two parts of the assignment. The rest of the parts were solved using a mix of the textbook and lecture book examples.
For finding C and S, I’m not able to find an expression between natural omega and omega naught. I used theta equation, theta dot equation and theta double dot equation. What am I doing wrong
The relation should come from plugging in zero to the theta dot equation. It may be because you need to use chain rule in order to differentiate S*sin(w_n*t). I found example 6.B.3 to be helpful for this part of the problem. Hope that helps!
There is no relationship between omega_n and omega_0.
• omega_n is the natural frequency, and this is dependent only on the mass and stiffness properties of the system (the parameters in the EOM).
• omega_0 is the initial angular speed of the disk (i.e., part of the initial conditions for the system).
I see most people are asking for the contribution of the reaction forces on the pin in this problem. While they are included in your free body diagram, if you take the moment around O they don't have any real contribution to solving the problem. Once you have your moment around the point, solving for the problem is just a matter of deriving and plugging in.
For this problem, it is important to note that the natural frequency equation does not use the k and m given in the problem. You must find the EOM first and use the coefficients to solve.
For Part C, when converting the natural frequency from radians/sec to hertz I just divided by 2pi
Note how our contact point here is geared! It is not defined by friction, so we don't have to worry at all about the normal force at the point of contact, there is none. Also, make sure that you base the positive x direction of the block off of the positive theta direction of the drum.
For the EOM equation, if they are linearly dependent / simplified where I divided out terms is that allowed or should it be the non-simplified equation.
Not sure of your question here. Are you asking if it is OK to divide through your EOM by a non-zero number?
Using the general equation in the summary and the initial values given helped me solve for theta(t)
Pay attention to the direction you assign positive x to and the direction positive theta is given, helps keep signs straight throughout the problem
For this question, I used the same process as hw6b to solve for the EOM. From here I used the EOM to calculate the natural frequency.
For part d, I highly recommend looking at the daily summary notes called "Vibrations - Free Undamped Response". It gives the form of the solution of our EOM for this problem, and then use the initial conditions provided in the problem to solve for C and S.
The best way to approach this problem is to first carefully do your free body diagram correctly. This is the most important step in my opinion as the free body diagram will allow you to set up your force equations and will allow you to see that taking the moment about O is the best approach as it will allow you to neglect the reaction forces at O.
This problem closely resembles problem H.6.B. Start by drawing an accurate free body diagram, as it's crucial for setting up the force equations and seeing why taking the moment about O is beneficial—it lets you ignore the reaction forces at O. Next, take the moment about O and use kinematic equations to link x double dot and theta double dot. Substitute these into the kinetics for part B to solve the problem.
For part d, I found it useful to understand that at theta(0), the overall value is 0, and at theta_dot(0) it equals omega_0, this will greatly help you when you are trying to find the responses.
Does the contact point being geared eliminate normal force acting on the drum at the point or does normal force act there and is simply made irrelevant by the lack of a friction force?
It might be beneficial to review the solution of HW H.6.B as the set ups to the problem will be very similar.
In this problem we use the time dependent expression of Acos(wt)+Bsin(wt). We use this general expression to denote a solution of both real and technically imaginary components. Note in later problems we will have an exp(damping) term however. The reason we don't need to account for this is that the current form does not need to be split with an exp as answers we would have derived from doing the quadratic formula (sometimes our answers would've been imaginary roots). Therefore we accounted for this without C initially but now need to consider it when solving for damping ratio in later homework.
Most of these concepts are generally the same and shared with the solution of HW H.6.A/B. Hopefully this clarification helps.
for the reaction, do we substitute x_0 and xdot_0 for Rtheta_0 and Rthetadot_0 or just to theta directly?
Note that for this question, it’s best to take the moment about O. Although there should be forces in the Ox and Oy direction, these will not be take into account when taking the moment about O. This is different than other example problems where the moment about C might have been taken.
The relationship between alpha and x_ddot is easily found through kinematics using the radius.
This question is different than example 6.A.3 because taking the moment about the contact point between the disk and block would make the question much more difficult. I recommend taking the moment about point O for the disk and the sum of "x" forces for the block. For part D, remember to read the question carefully. This will help when finding the values for C and S.
Observe the orientation of our contact point—it operates independently of friction, relieving us of any concern regarding the normal force, which is nonexistent in this case. Ensure alignment of the positive x-axis of the block with the positive theta direction of the drum.
This problem is very similar to 6.B.2. I have both of the spring forces acting in the same direction (positive x). Another important note is that x double dot is going to be equal to the negative R theta double dot because of kinematics.
I was a bit confused about the implications of "geared contact". However, as long as there is a force that's equal and opposite on the drum and the block respectively, that it sufficient to be able to equate the two equations you get by applying Newton/Euler's.
You were correct in that assessment, as Newton's third law allows you to put the normal and friction forces on that contact point between the drum and the block on both individual FBDs. Something that could confuse people is to be consistent with the sign convention of those forces, but as long as they pick on a direction for those forces in one FBD and the direct opposite in the other, the algebra should solve itself out.
Is there ever an instance when gravity would affect the behavior of the springs themselves?
In order to solve this problem correctly one must draw a free body diagram to see the forces and the moment about O. Then use the kinematic equations to connect x double dot and theta double dot to then solve for the next part of the problem.
Looking at the examples from class helped me solve this problem. Something important to note when solving this is that the FBDs should be individual, since the kinetics used to find the EOM are Newton/Euler.
Can you put the initial frequency in terms of x?
For this problem it is important to note the direction given by theta in the original problem diagram. This is very important to keep the signs correct while solving for the moment of the disc as well as the x, x dot, and x double dot components.
Remember, as usual with spring problems, that the two spring forces should be facing in the same direction at any point in time (or both be 0). This can be confusing to picture in your head, but it's crucial to getting the FBD correct and can throw off your whole problem from the start.
Once you have found the natural frequency (w_n) for part C, to convert from rad/s to hertz you should divide your answer by 2pi.
If you take the moment about O, you can relate x double dot and theta double dot. Then, you can plug them into kinetics equations and solve.
By taking the moment about O, you can relate x double dot and theta double dot. Then, it's easy to plug into your kinetic equations and solve
It is interesting to think about what would happen if the object on the block was different shaped. would the object falling flat change after a certain time change the moment?
It is very important to realize that there is no slip between the disk and the box but complete slipping between the box and the ground. This will make it so you want to do your moment about IC