| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints:
The derivation of the dynamical equation of motion (EOM) for a system is a straight-forward application of what we have learned from Chapter 5 in using the Newton-Euler equations. The goal in deriving the EOM is to end up with a single differential equation in terms of a single dependent variable that describes the motion of the system. Here in this problem, we want our EOM to be in terms of x(t).
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
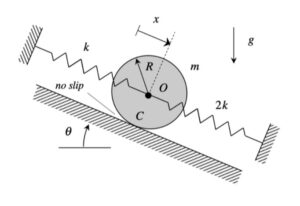
Draw a FBD of the disk. Define a rotation coordinate for the disk.
Step 2: Kinetics (Newton/Euler)
Write down the Newton/Euler equations for the disk.
Step 3: Kinematics
Use the no-slip condition between the disk and the ramp to relate x to the rotational coordinate that you chose above.
Step 4: EOM
Combine your Newton/Euler equations along with your kinematics to arrive at a single differential equation in terms of the dependent variable x.
Any questions?
Due to the mass being involved in the sum of the x-direction I end up getting a mgsin(x/r) in my EOM which complicates things in finding Xst. Am I missing something as Xst is when X double dot is zero and this gives me 3kx - mgsin(x/r) and I can solve for Xst as you can only plug in for one x. Where did I go wrong?
Dawson: You are correct. Your EOM should be linear in the dependent variable x.
What you write here is that you have a term like sin(x/R). It is not possible to tell for sure, but I think that you have inadvertently confused the angle theta for the incline with the angle of rotation for the disk. I say this because your EOM should have a term like sin(theta) in it due to gravity and the inclined ramp. But, theta does NOT equal x/R.
When solving for the EOM, is it incorrect to have an extra component other than M and k that is not =0? I have solved and have the component of mgsin(theta) but am confused if I am missing something
The general form of the EOM is (for a given dependent variable "x"):
M*x_ddot + C*x_dot + K*x = f(t)
where f(t) is the "forcing" in the EOM. Your term m*g*sin(theta) is the forcing term for your EOM.
Before getting too deep into this problem make sure you have the correct directions on the spring and friction forces. It will cause sign issues in the EOM if not.
I agree as this will definitely mess up your signs. Make sure both your spring forces are going in the same direction.
I agree. The important thing about the directions of the spring forces are they are consistent with your sign conventions. Here, with x being positive pointing down the incline, both spring forces in your FBD should be pointing up the incline.
The direction of the friction force is not important. For no-slip, friction is a force of reaction - drawing it either way in your FBD works. During the motion of the system, the direction of the friction force oscillates back and forth (between plus and minus). The direction of the friction force is more closely connected with acceleration rather than displacement, so knowing the direction for x does not give you a reliable indicator of the direction of friction.
To find Xsp do we just set x_ddot = 0 and then solve the EOM for x? I am a little confused on how to solve for it.
That is correct, in a static system the sum of forces would be zero. We know that x_ddot is the acceleration so using Newton's law, F=ma, we know that when we have a static system (F=0) acceleration (aka x_ddot) will also be zero.
Not exactly. Xsp is the position you add to x so that the EOM becomes homogeneous (it cancels the constant on the other side). As a result, you want to substitute x with z+Xsp, where z is the new position centered at the static equilibrium of the system versus x which was centered at the equilibrium of the springs. Finally, you simply solve for Xsp which cancels the constant in your equation.
Solve for x in terms of xst and z. It is clear that x_dot = z_dot and x_ddot = z_ddot. Use this to sub in necessary values and get z in the EOM equation.
The given equation z=x - xst can be rearranged to x = z + xst, which can be plugged into the EOM in terms of x and used to solve for the EOM in terms of z, given that the value for xst is known.
Since energy is conserved in the system, I used the change in height, xsintheta and the moment of inertia to help derive my EOM. Then frequency is a simple plugin using the basic formula. Dont forget about the 2pi.,
I would avoid the work/energy equation for developing the EOM. The EOM needs to be a second-order linear differential equation in terms of the dependent variable. The W/E equation is a first-order, nonlinear differential equation in terms of the dependent variable. Very difficult to solve for x(t) from that equation.
Would you have to divide by 2pi for Wn? On the summary sheet is just says wn = natural frequency, so would I just put it as the variables in rad/s, or is it required to be in the Hz, or does it matter as long as you note it.
Dividing by 2pi will always get it to Hz, like you said. In this ambiguous case, I will probably just leave it in rad/s and Hz just to be safe.
We are dealing with vibrations "analysis" in this course. All of the analysis that we do expects the frequencies to be angular frequencies (e.g., rad/s). In particuiar, when you write cos(omega*t) and t is in seconds, then omega should be in rad/s.
If we ask for a natural frequency on a problem in this course, then it is expected that would be in rad/s. Only when we specifically ask for a frequency in Hz will we expect the answer to be in Hz. As Charles says above, just to be safe you could always give the answer in both rad/s and Hz.
When solving this question, keep in mind that you cannot begin to solve part (d) until your equation is in standard form. This means dividing the entire equation by the coefficient of the angular acceleration.
To my understanding, you should be able to solve for wn before converting the equation to stand form. This is because the ratio k/m will remain the same when both k and m are divided by the same value.
For this problem, I found it best to align the X-Y plane along angle theta to simplify my calculations. Also, another way to simplify this problem is to take the moment about c.
I’d recommend looking at the lecture book example 6.A.2 is you need more guidance on determining your EOM. The only difference is that this problem is on an incline, so just account for that.
And for further help in dealing with the incline, I recommend looking at example 6.B.8.
is z ddot = 0?
Since z = x - x_st and x_st is a constant that does not depend on time, z dot = x dot. Differentiate this once more and z ddot = x ddot.
Lecture Book example 6.B.3 helped me understand the x_st value and the Z variable.
Remember that theta does not need to be found, it will cancel out with the weight term when you find the EOM in terms of z
Under April 10th on the daily schedule, the static deformation and EOM's animation was extremely helpful in visualizing the static displacement and helped to solve the problem.
You can solve for the EOM using either the moment about C or using the moment about O and summing the forces in the X direction. You will need to take in account friction when you use the moment about O.
For no-slip conditions, the direction of the friction force is irrelevant in your free body diagram (FBD) because it acts as a reactionary force and can oscillate during motion. The direction of friction is more tied to acceleration than displacement, so knowing the displacement direction doesn't reliably indicate friction's direction.
For this problem, lecture 6.B.3 helped me to understand the directions of the spring forces. Although the sign of the friction force is not important, the spring forces must align with the value in the positive x direction. In this case, both of the springs will oppose the motion.
Pay attention to the direction of theta plus and x plus to make sure that the signs of the spring forces are relevant to the direction of the x given in the diagram. This will be important for solving your EOM equation.
The video example 6.B.3 helped me to better understand the relationship between x and x_st, and x and z.
Remember to set a rotation coordinate, as this will affect your moment equation about O if you choose to solve that way.
For review or those doing it, I would acknowledge that the orientation of where we define the rotation as positive is important. If the rotation is not in the same direction as our defined x-axis, then the way we describe acceleration must be -r(theta double dot).
I made this mistake which resulted in terms of opposite signs.
For this problem, make sure that when you are calculating your natural frequency, you are dividing by the mass as well as the coefficient in front of it.
I think utilizing the principle of energy conservation would simplify this problem. It would involve calculating the rotational kinetic energy, two forms of spring energy, and gravitational potential energy to aid in determining the equations of motion.
In this problem I found it useful to have the disk rotating down the incline because it makes working with the signs easier because the direction of the x axis is already defined. You can technically do it either way, but it makes things simpler in my opinion.
The question says that we might use R in our natural frequency. I did not. Did I make a mistake?
To solve this problem, first derive the equation of motion x_ddot in terms of x, considering forces like gravity and springs. Then, find the static displacement x_st by setting the net force on the disk to zero and solving for x.
This may be a minor thing that the TA graders will not really check for, but for my EOM in terms of x (answer to part a) I had any of my applied forces on the right side of the equation, which in my case was an angled component of the force due to gravity.
Doing that makes the EOM written in terms of its general form (ref. pg. 381), which is how I've seen previous examples I've done been expressed as.
To help understand how to determine static displacement, example 6.B.3 is helpful.
Determining the moment about point C helps remove variables in the summation of moments equation. Additionally, the coordinate system can be defined an angle to allow for easier computation.
When calculating natural frequency be sure to look carefully at the equation and divide the mass and the coefficient in front of it.
If you were to evaluate this problem at the point of contact, would parallel axis theorem need to be used?
For parts a through c I found it very helpful to refer to lecture book example 6.B.3 as it goes through a similar process to what is required on this homework.
When doing the kinetics for this problem, something important to pay attention to is to have the spring forces both be negative values. This adds up to a total of -3kx in the summation of forces in the x-direction.
While doing this problem it is important to note the direction of the axis, as it is along the ramp instead of a horizontal x and vertical y like usual. With this in mind, the only component that references theta is the weight (mg) of the disk.
Example problems 6.A.2 and 6.B.8 are helpful to look back on as a conceptual reminder when reviewing this problem, especially if you're rusty on the concept of an EOM.
Example 6.B.8 was helpful for me when solving this problem. Also, in order to find the natural frequency in hertz for part D, you should include (1/2pi) in your answer.