| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
Comments are closed.
the units for c are kg/s instead of Ns/m, is this an error?
That’s been fixed
Please note that kg/s is equal to N*s/m.
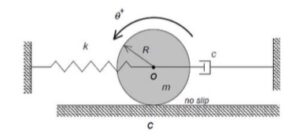
Pay attention to which Newton/Euler equations to use for this problem as we are asked to analyze the motion of a disk that is not slipping. It is best to use an equaiton that can negate the value for the friction force acting on the disk.
For the sake of this problem, I highly recommend taking the moment from the point of no-slip (usually denoted as point C). This helps ignore the forces in the y-direction and the friction force, only focusing on the effects of the spring forces and dashpot forces.
I started to go with the x and y direction forces and realized this was not the best approach. Taking the moment at C is really the best approach to this question.
Taking a moment is the best approach here, I noticed this as well. I took the moment about point O and created an equation that included frictional force.
I also used a moment about point O, but using a moment about point C would necessitate one less equation.
It is important to make sure that all your signs in your EOM equation are the same. Although it doesn't explicitly state to solve for the undamped natural frequency, the damping ratio, and the damped natural frequency you must solve for these values to solve the problem.
For part b when we write our solution can we leave it symbolically in terms of the parameters or should we substitute the numbers?
Put in the numbers.
It's also important to cancel out all the Rs in your EOM. When I did not cancel them out, I got a zeta value of 1, which would yield a damped frequency of 0, which is not correct.
I'm assuming the natural frequency needs to be computed so that you can find the correct equation for theta(t)?
Yes when I did it I solved for the natural frequency, damping ratio, and damped natural frequency.
Note that friction force times the radius yields inertia times theta_double_dot. This will help simplify things for the EOM.
Finding the moment about the non-slip point C gives you the EOM. Additionally, damping ratio and natural frequencies can be solved for as well. These values will help in calculating the response of the system.
Is there a difference between the x(t) general equation used in the previous homework and theta(t) for this homework question?
The general equation is the same except you are given a non-zero value for theta(0) in this problem.
I used the same equation to begin the analysis for x(t) and theta(t).
Remember to check the zeta value to find if it is an under damped , over damped or critically damped scenario and then you can use the corresponding equations.
Does the spring being stretched at theta_0 affect the response?
You use the value given as theta_0 at t = 0 to find the C value in the solution equation. Then do the same with theta_dot_0 to find S.
How do we determine the direction of spring force?
Draw your FBD based on a POSITIVE theta rotation (CCW, as given in the problem statement).
A CCW rotation of the disk creates a COMPRESSED spring. A compressed spring will push on the center of the disk to the right. Therefore, the spring force points to the right.
since theta dot is given as a negative, this means that the disk is actually rotating CW. Shouldn't the free body diagram be drawn to reflect that?
No, this is because theta dot is only an initial velocity. Theta is defined as positive CCW by the problem statement. Theta(t) should be an equation for any time t > 0, regardless of which way the disk rolls. Drawing theta CCW will be the simplest way to solve.
No, the diagram only represents the positive direction as a reference for theta in general. Though, be careful with using this CCW reference in relations to the direction of the x coordinate.
For disk problems, it is ideal to take the moment at the no-slip point as it does not have the friction force in the moment equation. I also found that for questions that have a spring and a dashpot, with one on each side, the moment equation should have the c and k terms as negative terms. This makes sense because they act in opposition of the overall motion of the disk.
Its important to note here that theta(0) =/= 0 in this problem. For a lot of the problems we have been working on this has been true, but it is not always the case. This is necessary to remember when solving for the response of the system theta(t)
Pay attention to the value of theta(t=0), it's a non-zero value so the derivation ends up being a bit different than before.
Thank you, this was helpful.
If you were to assign positive x to be leftward, does that change the sign of the moment based on the right hand rule? In other words, does the sign of the moment also flip?
I do not believe it should affect the moment equation since you are only evaluating what kind of torque/rotation occurs due to the forces. In this case, taking the moment about the contact point C, the forces pointing to the right cause a CW rotation. Since CCW rotation is designated as positive by the problem, then the signs would be negative.
However, assigning positive x to be leftward does affect your kinematics, as someone commented below.
Is this problem similar to previos ones when it comes to taking our moment about the disk? As I recall taking the moment at the contact point of the disk and the ground is easier?
You're right. Since we don't know the magnitude of frictional force, taking the moment about the contact point is easier
You could attempt to solve the problem with a moment about the origin by using an extra Euler equation. Though, this will add another unnecessary step that should be avoided.
For getting theta_dot of t, make sure you do chain rule, as it significantly affects one of your constants in the system response equation!
Set up your eulers/newton equations in a way where you can avoid including friction in your final EOM equation to make further parts of the problem easier.
Ensuring consistency in signs throughout your EOM is crucial. While the problem might not directly instruct you to find the undamped natural frequency, damping ratio, and damped natural frequency, solving for these values is necessary to complete the problem.
As a general rule of thumb for no slip problems, I assign the direction of +x to be to the left if +theta is CCW (as in this problem) or right if +theta is in the CW direction. This ensures no negative signs in the kinematic portion of the problem.
I found it easiest to set up my moment equation around point c and use the parallel axis theorem to see the sum of moment equal to acceleration. I did this because the disk rolls without slip so there must be a friction force acting at c. If one was to do a sum of moment around point o, they wouldn't be able to account for the moment caused by the friction force as easily.
Since the disk is rolling on a no slip surface, the relation of x and theta should be x=theta(R)
If you analyze the moment and the moment of inertia about the point of contact, C, for no slip, then you will not have to factor in the x or the force of friction since the force of friction acts through point C.
I highly recommend looking at the daily summary titled "Vibrations - damped free response". It should be in the daily schedule for this week. This should save you some time in figuring out the solution to your EOM, as long as you verify that the system in underdamped.
Its important to remember that disk is accelerating in the negative direction. This helps ensure that all your signs are the same.
For this problem, you will still need to find the undamped natural frequency, damping ratio, and damped natural frequency in order to get the response of the system, even though they aren't asked for.
I used the moment about the center of the disk to allow two equations that use the force of friction to relate.
For this problem I started by taking the moment about point C. This allows for us to focus on the spring forces acting on the disk and not have to worry about the normal, gravity, or friction force. From there I found the EOM and was able to manipulate the coefficients to find the variables that the question asks for.
It helps to draw a sign convention arrows for the directions that make CCW positive when getting the final EOM equation.
It is important to adhere to your sign conventions once established in order to make everything consistent across your equations.
This equation is impossible to solve unless one takes the moment around the instant center of the disk. This method means that one half of the equation uses x and x_dot while the other half uses theta_double_dot. Here a kinematics relationship can be used to relate the two.
Make sure to take the moment at the contact point; it makes things simpler later when solving. Also pay attention to your signs in the final EOM.
In order to find the EOM for part B you must use the moment equation. Then one that is solved it can be used to find the damping ration and natural frequencies which can then be used to calculate the response of the system.
Unlike HW 6.E note that there is a rotational aspect to this problem which should be added to the EOM in part B of this problem.
Remember that the most important thing is to make sure off your directions as otherwise you will not get real values for the natural frequencies. In this case as it is rotating in the CCW, the spring force acts to the right. This helps us in understanding how to structure the moment equation in part B through which we can gain all the other required variables.
Do not forget that theta_0 is a non-zero number in this problem, unlike the past problems.
Make sure to remember that rad/s is not equivalent to hertz; failing to convert between these two will cause inconsistencies in your calculations.
Do we have to account for friction?
This is very similar to the question that we did today in class. If you need help I would recommend starting there!
The key to solving this problem is to able to relate x and x dot to theta. This will make the EOMs consistent. It is also important to consider the sign convention for which way is positive.