| Problem statement Solution video |
NOTE: Please complete ONLY Part (a). Do not work on Part (b).
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link.
Discussion and hints
The four-step plan:
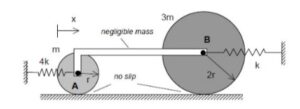
- FBD: It is recommended that you draw individual free body diagrams of each disk and of bar AB. Note that the mass of AB is negligible and that forces are applied at only two points (i.e., a two-force member). What does this say about the direction of the forces on the disks at A and B?
- Kinetics: Recommended that you use an Euler equation about the contact point of each disk since those are no-slip points for whose accelerations are directed toward the center of mass of each disk. Note that both of these two equations will involve the load carried by AB. You can eliminate that load from these equations, resulting in a single equation.
- Kinematics: Note that rigid bar AB insures that the velocities of points A and B are the same. How can this be used to relate the angular accelerations of the two disks? Can you see this kinematic relationship between the angular accelerations in the animation above? Please note that the angular accelerations of the two disks are NOT the same, although their centers have the same accelerations.
- EOM: Combine your results from Steps 2 and 3 to produce a single differential equation of motion (EOM) in terms of the x-coordinate.
Page 388 of the textbook has some equations for natural frequency that may help with part b of this problem.
Please see the Note above stating that you are asked to do only Part (a) of this problem. Not Part (b).
I do want to elaborate on this further for anyone wanting to get additional information for Homeworks C and D.
When talking about natural frequency this is the point when the vibrations are the greatest or when the amplitude is the greatest. Referring back to MA262, this is in relation to the concept of particular and complementary solution. In some problems it will be required to split the answer into cos and sin components due to the existence of an "imaginary" component. Why would this matter? Well, if we take the magnitude of a real number and an imaginary number, the imaginary number squared actually subtracts from the real component when we take the square root which results in a smaller real magnitude. (Unrelated but similar to circuit analysis in wanting to remove the purely imaginary components to maximize power!)
But without going too far off topic, to find the natural frequency we want to take the square root of K/M which we determine from our EOM. Btw, for the coming homework you need natural frequency to solve for the specific solution from the general solution (using initial conditions when x=0 for both equation as is and first derivative of the equation to solve for C1 and C2).
Hopefully this helps in clarifying what natural frequency actually is!
For the two force member at A the reaction force will act in the direction of B correct?
Yes, that is correct. The reaction force at A will point directly at B, and the reaction force at B will point directly at A. They are equal and opposite.
Do the reaction forces have reactions in both x and y directions on both disks because they are pinned to the disk at those points?
For the analysis I don’t think the y component if it exists matters. If you are solving by taking the sum of the moments about the no slip point the y direction wouldn’t matter regardless.
As discussed above, AB is a two-force member - the reactions at A and B are aligned with the line connecting A and B. Therefore, the reaction forces on the disks WILL have both x- and y-components.
As Bradon points out, however, the actual directions of the reactions on the disks are not relevant if you take your moments about the centers of the disks.
I found it useful to look at lecture book example 6.A.2 as it required a similar process to this homework.
Do not forget to include friction from the wheels in the FBD's, it changes the method of solving the problem completely.
I did not notice this as even though I included friction I took the moment about the point the surface is in contact with the disk and friction did not really affect it.
Since we are not given the length of the bar, how are we to find the angle to determine the percentage of force in the x direction to help find the moment equation.
If you are talking about the reaction force from the bar, I believe you do not need to find the value for the force in the x direction. Just write it as a variable and keep in mind the x component of the force is equal in magnitude on both A and B. When you write out the Euler equations for A and B, by combining those equations the variable should cancel out and never need to be calculated.
Make sure to keep the directions consistent to how you define the motion and forces in your FBD to the N-E equations for the rotation and x movement.
Would the units of the EOM equation be meters?
I would think it'd be Newtons, m*x'' = mass* m/s^2, k*x = newtons/meter * meters, ect
When solving this problem, I found it easier to take the moment equation from the center of the disk rather than the no slip point. Therefore, you no longer need to solve for the reaction force.
How do we know which direction to draw the spring forces? Does it matter?
The direction of the spring force will matter because it will have an effect on the rotation of the wheel in the moment equations about the no slip points (no slip to eliminate friction force). To think about the direction of the spring force, it is best to approach this with visualization. Think about what will happen if the wheels move right: In this scenario, the right wheel will squish the right spring causing the spring to push back on the wheel to the left. The left wheel will stretch the left spring because it is moving to the right causing the spring to push back on the wheel to the left. This means that the spring force for both wheels will always be in the same direction.
I found Example 6.A.2 helpful for the kinematics portion of this problem
I found taking the moment from the no slip point to be most similar to example 6.A.2, and easiest because you do not know what direction friction is acting because it will change throughout a period so it was best to change where you do your moment
If you do not remember the relations that a two-force member imposes on a system, I recommend taking the moment about the center of mass as the reaction forces about A and B will no longer be relevant. This does, however, mean that friction will be utilized in the moment equation.
Can we assume the bar has no angular or translational acceleration?
The bar has translational acceleration; however, note that it has negligible mass. So, although it has an acceleration, the value of mass*acceleration is still zero.
Something important to note in this problem is that the mass of bar is negligible compared to the mass of the disks. This helps when you are drawing the individual free-body diagrams.
The problem is pretty straight forward. One important thing I would keep in mind is to find a away that relates both disks. Additionally, remember that the spring constants are different. Again, someone mentioned that example 6.A.2 was really helpful, and I agree with this.
I am slightly confused on the hint to use the velocities of A and B being the same to relate the angular accelerations. Would equating the velocity kinematic equations just result in a relationship between the angular velocities? I would think relating the i hat components of the kinematic acceleration equations would be more useful as that lets you relate your angular acceleration terms.
I am confused on how knowing the velocities of the disks are the same allows us to relate the angular accelerations.
I could be wrong but I think that because these points are on a rigid body that the accelerations at point A and B are the same which lets you relate the alphas to each other. That was the only way I was able to make that hint make sense.
The rigid bar AB is in pure translation; that is, omega_AB = 0 and alpha_AB = 0. Therefore, all points on AB have the same velocity. And, all points have the same acceleration.
When working out this problem, I found it best to take the moment of inertia about the contact point with the ground. Also, it is very important to keep the direction of forces on your free body diagrams consistent to help with calculations in later steps.
Make sure you assume that the spring forces are facing in the same direction for both the 4k and k spring. Also remember your frictional forces as they are essential for solving this problem as the combined body moves laterally with the same speed (both disks)
You can simply use Euler equations for across the center of the masses, this allows you to eliminate all the force but friction with exception to the spring forces. And as friction can easily be written in terms of other substitutable variables, you can get one single equation from it through substituting that can give you the EOM.
For this problem, it is important to consider the directions things are moving in to consistently define the directions of the forces. Since a rigid bar connects A and B, then their velocities are the same. To solve this problem, one should start by writing separate Euler equations for the two disks and using the reaction forces from the bar to connect both equations. Next, it is important to realize that the contact points of the disks can be used as instant centers. The results from using the instant centers should be plugged into the Euler equations.
Would it be fair to assume since the mass of the bar is negligible, that the reaction force on end A and end B would sum to zero according the Newton's equation?
While I think this is an assumption that can be made, I don't know how it would help to solve the question. The way I solved it (taking a moment about the contact points) allowed me to relate the reaction forces in the x direction due to the bar being a 2-force member; therefore allowing the alphas of each disk to be related.
Yes, with the mass of the bar being negligible, the reactions at A on the bar are equal and opposite to the reactions at B on the bar.
For this question, it is important to pay careful attention to which direction your draw the spring forces on your free body diagrams. For kinetics, I found two moment equations for the contact points of the wheels. For kinematics, I related v to w*r and x dot.
After writing two moment equations around the no slip point, I found it helpful to set them equal to each other via the reaction force term coming from the bar. This is the variable that they both share.
As others have said, example 6.A.2 is very useful for solving this problem. It's important to note that when the instructor in the solution video relates x double-dot = R theta double-dot, theta double-dot is equivalent to the angular acceleration of the disk. Thus, you should have two small equations that each relate the angular acceleration of disk a and b and their respective radius to x double-dot.
It can be tricky to get all of the forces in the correct directions. Make sure to be careful when setting this part of the problem up. If your directions are not consistent it will cause errors in calculations.
This is post is a week later then when we did this homework. Would we now be able to do part B of this problem? It seems like we have learned about how to go about solving B.