| Problem statement Solution video |
DISCUSSION THREAD
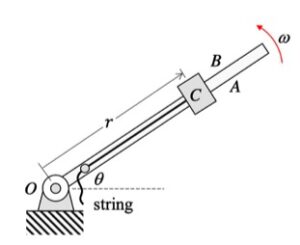
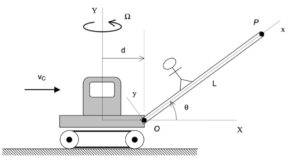
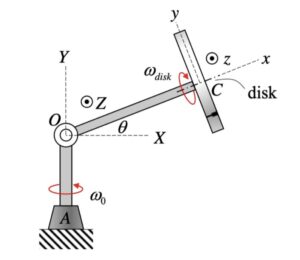
Since the motion of P is being described here in terms of polar variables of r and θ, it is recommended that you use a polar description for your forces and acceleration.
Use the Four-Step solution plan outlined in the lecture book:
Step 1 – FBD: Draw a free body diagram of C. NOTE: The arm rotates about a vertical axis, meaning that the arm moves in a horizontal plane; that is, the gravitational force acts perpendicular to the plane of the paper.
Step 2 – Kinetics (Newton): Resolve the forces in your FBD into their polar components. Sum forces in the r-direction and set equal m*ar. Sum forces in the θ-direction and set equal to m*aθ
Step 3 – Kinematics: Use the polar kinematics descriptions of ar = r_ddot – r*θ_dot^2 and aθ = r*θ_ddot + 2*r_dot*θ_dot.
Step 4 – Solve. When solving for the normal force, N, acting on C take note of the sign on your answer. What does this sign mean in terms of answering Part (c)?
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.