| Problem statement Summary sheet for 3D MRF kinematics-2 Solution video |
DISCUSSION THREAD
Any questions??
Discussion and hints:
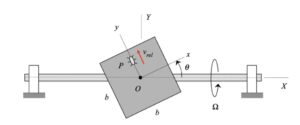
Your first decision on this problem is to choose your observer. Since an observer on the plate will have the simplest view of the motion of the insect, attaching the observer to the plate is recommended. Also, attach your xyz-axes to the plate.
Next write down the angular velocity and angular acceleration of the plate. Based on what we have been doing up to this point in Chapter 3, hopefully it is clear that the plate (and observer) has two components of angular velocity: Ω about the fixed X-axis and θ_dot about the moving z-axis. Take a time derivative of the angular velocity vector to find the angular acceleration of the plate (observer).
Following that, determine the motion of the insect as seen by the observer on the plate.
Use these results with the moving reference frame kinematics equation to determine the velocity and acceleration of the insect.
is omega in the positive or negative k direction?
Omega is not in the k direction at all. The problem statements states that the rod, which rotates at omega, rotates about the fixed X-axis, so that is the direction of omega. Theta dot, however, is in the positive k direction, by the right hand rule.
Similar to the problem we had a while back with the roller coaster rotating about the X axis.
Yes! Also similar to 3.B.6 which was done in class and has a similar process to solving this problem.
When it says that the plate is pinned to the centerline of the shaft, I am assuming that means the position vector from the center of the shaft to the plate is zero? Meaning O has no velocity or acceleration?
This is safe to assume, as no distances or alternate views of the problem are given to justify why this would not be the case.
Yes, you would have to assume this so that you can use the rigid body equations to find v_p and a_p and just plug in the given values.
You actually cannot use the rigid body equations, as the distance between point P and O does not remain the same as the insect moves. Solve for omega given the various rotating components, and derive with respect to t to solve for alpha. Then Use the MRF equations to solve for Vp and Ap
I was also pretty certain that O has no acceleration and no velocity. This is because it is the axis with which the square rotates around as well as since it is in the center of the other axis of rotation, both of these should be 0. This is my understanding at least.
You are correct in your reasoning.
This uses a pretty straight forward method of solving the problem. It sums up most of what we learned since the start of the year. Find angular velocity and angular acceleration by derivation and use the formulas.
I am seeing some fairly large numbers in my acceleration vector. Is this to be expected?
I recommend placing an observer on the plate. This way the V_rel and r_rel will be simple. However, omega will be a combination of rotation for the shaft and the plate.
This problem is pretty simple if you take care of which axes the rotation occurs and you place your observer in an appropriate place.
To find (a_P/O)_rel, would you take the time derivative of v_rel*j, or would you just assume that it’s zero because v_rel is constant? Taking the time derivative gives me a nonzero vector for (a_P/O)_rel.
Since v_rel is constant AND since the observed path is straight (no centripetal component of acceleration), then (a_P/O)_rel = 0.
This problem is similar to 3.B.6 which was done in class. It is pretty straightforward and uses the standard approaches we have learnt in chapter 3 so far. Since the problem is asking for the velocity and acceleration when theta = 0, the xyz and XYZ axes will line up, meaning that there I = i, J = j and K = k.
Be careful with your Rp/o. Keep in mind how the plate is bxb, but point O is in the middle of those dimensions, so Rp/o would have to be half of b.
When deriving the angular acceleration, made sure to recognize which axis is fixed and which is rotating. You might get the same magnitude but the wrong sign if you derive the wrong terms. Hope that helps!
This is a relatively straightforward problem. Refer to the roller coaster hw problem and 3.B.6. Remember that the angle is 0, so the (i,j,k) components are the same as (I,J,K). First, solve for angular velocity, then solve for angular acceleration. After solve for Vp, and Ap, knowing that (Vp/o) relative is given and constant making (Ap/o)rel 0.
When setting up the velocity equation, can i set it up with respect to O, where V_0 is zero (center of the shaft), but the w of the insect is = theta dot j + the shafts angular velocity in the i ?