| Problem statement Summary sheet for Newton's Laws - 1 Solution video |
DISCUSSION THREAD
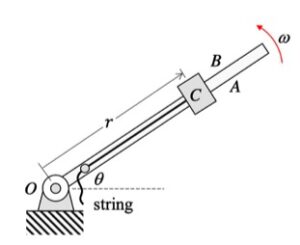
Since the motion of P is being described here in terms of polar variables of r and θ, it is recommended that you use a polar description for your forces and acceleration.
Use the Four-Step solution plan outlined in the lecture book:
Step 1 - FBD: Draw a free body diagram of C. NOTE: The arm rotates about a vertical axis, meaning that the arm moves in a horizontal plane; that is, the gravitational force acts perpendicular to the plane of the paper.
Step 2 - Kinetics (Newton): Resolve the forces in your FBD into their polar components. Sum forces in the r-direction and set equal m*ar. Sum forces in the θ-direction and set equal to m*aθ
Step 3 - Kinematics: Use the polar kinematics descriptions of ar = r_ddot - r*θ_dot^2 and aθ = r*θ_ddot + 2*r_dot*θ_dot.
Step 4 - Solve. When solving for the normal force, N, acting on C take note of the sign on your answer. What does this sign mean in terms of answering Part (c)?
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
This problem is very similar to what was worked out in class, specifically 4.A.10. Remember to draw your force diagrams to solve this problem.
Should we expect T to be negative here? Since r_dot is also negative?
The sign you get back on T will depend on how you draw your FBD. I assume that you will draw T pointing from C to O. That direction would correspond to the cord being taut and in tension. For that FBD, you should get a positive value for T. A negative value of T would mean that the cord would need to be "pushing" on C. And, we know that you cannot push with a string.
The problem statement gives us all information we need to come up with a fully numeric answer other than the angle at this instant. Am I missing something, or are we supposed to leave our answers in terms of theta?
This had me confused for a while, I believe the key is
"NOTE: The arm rotates about a vertical axis, meaning that the arm moves in a horizontal plane; that is, the gravitational force acts perpendicular to the plane of the paper."
What you are thinking of as the y axis is actually the z axis. mg is acting out of the page, thus is not necessary in the calculations.
Are you saying that what's typically viewed as x (left right) and y (up down) is actually x (left and right) and z (up down)? This would make y coming out of the page right? how would this eliminate mg?
The issue does not have any connection with coordinate axes. The arm is rotating about a VERTICAL axis at end O. Therefore the plane that you observe from the provided figure is a HORIZONTAL plane. The gravitational force acting on C is in the vertical direction; that is, weight acts perpendicular to the page. Weight has no influence on the motion of C as C moves along the horizontal arm.
To add to what Colin said, if you look at example 4.A.10 you can see that this problem can be solved using an e_r and e_theta coordinate system that eliminates any need for theta and uses the given values.
The only reason you can do this question and example 4.A.10 is because the rods are rotating within a horizontal plane. The polar description doesn't inherently remove the need for angle of inclination.
To determine where the block makes contact on the arm remember what the sign for your normal force tells you. Also remeber what happens when rdot is greater than or less than zero. Like what others said it helps to refer back to example 4.A.10.
When I have the solution for T, should I report the final answer in the true direction/sign, or the direction/sign? For example, assuming negative and solving positive. Should the final answer be reported as negative?
Tension is the magnitude of a force. It is correct to state that as a positive number. If you find that your answer shows that the cord is “pushing” on the block, then you may want to check back over your work.
I thought I heard in class that this example would work opposite the example 4.A.10 in that N > 0 means C is contacting B (the upper surface), and N < 0 means C is contacting A (the lower surface). Is this accurate?
I think that would depend on which way you draw the normal force vector to face. If you draw it down and to the right (negative e_theta direction), I believe that for N > 0, C is contacting B and for N 0, C is contacting A and for N < 0, C is contacting B. That's just what makes sense to me, at least.
Accidentally posted the comment above before I was finished making changes. What I meant to say was:
I think that would depend on which way you draw the normal force vector to face. If you draw it down and to the right (negative e_theta direction), I believe that for N > 0, C is contacting A and for N 0, C is contacting B and for N < 0, C is contacting side A. That's just what makes sense to me, at least.
Ok somethings gotta be wrong with this website it's not like saving my changes when I post my comments so theyre all like unifinished
Having determined the side of contact through calculations, does anyone have a way of visualizing why this is? it seems counter intuitive to me given the direction of rotation.
It does seem counter-intuitive at first glance since w and w_dot are both positive which means the rod is accelerating counter-clockwise. From this, you may intuitively visualize that normal force should therefore be pointing towards the top-left position and therefore in contact with B. However, that is only the case if the block is not moving along the rod since the force on the block is also governed by its motion along the rod (as you can also see in the equation for e_r). Since r_dot is negative, r is getting smaller which you can intuitively see contributes to a decrease in normal force towards top-left position in the picture. As a result, we have two competing components in the force of e_r with the decreasing component overtaking the increasing component ( magnitude of r*theta_dotdot < magnitude of 2*r_dot*theta_dot) which explains why you get a negative normal force. I don't think it's possible to intuitively assess such a scenario as you would need to perform calculations to see which component of e_r is larger. The only way intuition can be used here is if the case is simplified such that the block is not moving on the rod. In that case, you can simply find the direction of N by w and w_dot.
Oops I meant e_theta here not e_r.
I feel like it makes sense to me if you think that block C wants to remain in place, but since omega is showing that the arm is rotating counter-clockwise, side B is therefore coming in contact with the inside of block C in order to push it in the positive e_theta direction.
Right. But that again goes back to the intuitive simplified case where the block isn't moving. If it's moving along the rod with a decreasing radius it's nearly impossible to conceptualize because it doesn't depend solely on omega and omega dot. Otherwise, if it did, we could've just ignored N entirely and said its in contact with B due to positive omega and positive omega dot. The purpose of the problem here is to calculate N to determine which side the block is in contact with. The intuitive reason why 2*r_dot * theta_dot is in the e_theta equation is because at a smaller distance from the axis of rotation, the speed required to maintain the same omega is lessened. Therefore, the rod actually slows down the block when it is sliding inwards which means the contact point would be A (if omega was constant). So in this problem, when finding e_theta, you have the component of increasing angular acceleration that makes the rod push the block counterclockwise and the component of the block moving inwards causing the rod to push the block clockwise. The sign of N will be governed by which overtakes the other. That's why it's pretty much impossible to intuitively answer C without calculations. Intuition can only answer cases when both of these components aren't competing with each other (for example, angular acceleration is positive and rdot is positive --> in this case its pretty easy to see contact point is B).
Colin: There is an animation of a similar problem that you can see on the course website. To see the animation, either go to the link on Friday, 2/16, entitled "contact forces due to Coriolis acceleration", or just click here. This video might help you visualize the relationship between the direction of rotation and the direction of radial travel in ascertaining the side of contact during sliding. I find it challenging to visualize on a piece of paper, but seeing the animation can be helpful.
Let me know if that does not help.
Is the final units of this supposed to be kilograms? I'm having a hard time getting all of my units to get down to just kilograms.
It should be newtons, since force = mass times acceleration. Kilograms would be just mass.
I've considered are you supposed to convert the m/s^2 to kg with a ratio of 9.81m/s^2 to 1 kg.
In the directions provided in the hints section, it says to equate the force to m*a in whichever direction you're trying to solve for, which if you look at the units gives you kg times the m/s^2 you already have or Newtons. You should not have to multiply by gravity in this instance
Should our answers for tension and normal force be vectors or scalar numbers?
Both scalars.
Should either of these answers be vectors?
No, all of your answers should be magnitudes, so scalar.
My classmates and I have had some heated discussions about what side of the rod does the block contact, and I was hoping someone could shed some light on their thought process. So far, I have answered that the block contacts side B. Without my drawings to illustrate my thoughts, I believe that if the rod accelerates counter clockwise, then it would be pushing block B with the leading side, which in this case is side B. Mathematically this also makes sense, as the rod pushes the block with positive 54 N in the e theta direction, and the block pushes back with -54 N in the e theta direction.
The assumption that "if the rod accelerates counter clockwise, then it would be pushing block B with the leading side" isn't quite accurate because e_theta also has a component for the motion of the object along the rod. If r_dot is large enough, the rod would actually be pushing on side A.
I believe it is B as well. I initially assume the contact point at A. After calculating the normal force, i got a minus which indicates that my assumption is wrong. And yes when thinking abt it visually, It only make sense to contact B as the arm rotates. Hope that helps!
I believe it is B as well. I initially assume the contact point at A. After calculating the normal force, i got a minus which indicates that my assumption is wrong. And yes when thinking abt it visually, It only make sense to contact B as the arm rotates.
Be sure to create a free-body diagram and guess the directions of the forces so that the sign of your values will have meaning and allow you to complete Part C.
I made two mistakes on this one initially. First was including gravity in the equations. While gravity is there, it is in the k direction so it is not involved in the equations we are using. Second was trying to use cartesian rather than polar. While this works, it is much more effort.
Does it matter whether or normal force is positive or negative since we also define which side of the arm the block contacts?
Report the answer as a magnitude. Use the sign to report on which surface that the contact occurs.
Would it be correct to assume that the side that makes contact with block C is the side that the normal force points towards since the block slides along the outside of the rod instead of in a slot through the rod like in example E4.A.10?
When solving for the normal force, I believe the sign you get will be based on the assumed direction in your FBD. That being said, is it good practice to just always assume positive direction first, or should you just assume whatever direction your intuition says it would be?
I would recommend that you not spend too much time at the stage of drawing the FBD trying to figure out which way the force should be drawn. Just make a choice, stick with it throughout the analysis, and let the sign on the answer tell you if your assumption was correct.
When drawing the FBD, is the direction of the normal force arbitrary or would it be dependent on omega?
You will discover that the direction of the normal force depends on the sign of omega and the sign of r_dot. You do not need to know that in order to solve; that will come out automatically from your work. Assume a direction, stick with that throughout and let the sign of the answer for the normal force tell you if your assumption was correct.
Do we have to assume that the w_dot given is in the positive k direction as the same way as w? Like is it stated anywhere or is there a way we were supposed to know?
The figure shows omega as being CCW. The data provided says that omega_dot is positive. Therefore, omega_dot is also CCW.