| Problem statement Summary sheet for 3D MRF kinematics-2 Solution video |
DISCUSSION THREAD
Any questions??
Discussion and hints:
It is recommended that you use an observer attached to the wheel. As we have discussed in class, your choice of observer directly affects four terms in the acceleration equation: ω and α (how the observer moves), and the relative velocity and relative acceleration terms (what the observer sees). Note that the remainder of the discussion here is based on having the observer attached to the wheel.
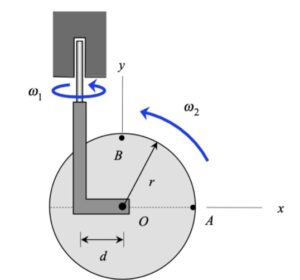
The wheel shown above has TWO components of rotation:
- a rotation rate of ω1 about a fixed axis (the "+" Y-axis), and,
- a rotation rate of ω2 about a moving axis (the "+" z-axis)
(Be sure to make a clear distinction between the lower case and upper case symbols.)
Therefore, the angular velocity of the wheel is given by:
ω = ω1J + ω2 k
The angular acceleration vector α is simply the time derivative of the angular velocity vector ω : α = dω/dt. In taking this time derivative,
- Recall that the J-axis is fixed. Since J is fixed, then dJ/dt = 0.
- Recall that the k-axis is NOT fixed. Knowing that, how do you find dk/dt?
With the observer attached to the wheel, what motion does the observer see for points A and B? That is, what are (vA/O)rel and (aA/O)rel, and (vB/O)rel and (aB/O)rel?
NOTE: Pay particular attention to the motion of the reference point O. What path does O follow? And, based on that, how do you write down the acceleration vector of O, aO?
For finding a_O should I be using an arbitrary point that is d length from O on the L shaped bracket?
That is what I did. I chose the point on the axis of rotation length d away from o to make the math simpler.
When I solved for Ab I got a vector that had i,j,k is that right as I feel like you would only have the j comp as its the centripetal force, or is the acceleration of O attributing to that as its not a fixed point.
I also got an i,j,k vector for a_B
It makes sense for B to have an acceleration component in each direction. While there is a centripetal acceleration from the rotation of the disk, which acts in the j direction, the other components of the acceleration come from the fact that the observer on the disk experiences an acceleration due to the rotation of the rod. The acceleration of point O does contribute to the acceleration of B when using O as a reference point.
For parts 2 & 3 of this question, I found it very helpful to look back at example 3.B.8 from the lecture book. the only difference is that you need to set your own arbitrary point that is distance d from the center.
for finding v and a of points A and B, I found it easier to put together equations with the observer on the disk. However, Using an observer elsewhere is possible.
Why (from a logical perspective, not a mathematical one) would it be that point A has an acceleration in only one direction, and point B has an acceleration in the i, j, and k directions?
That is a good question, but one without an easy answer.
I would consider point B to be more of the norm in that its acceleration has components in all three directions. The question is, actually, why does A have only one component (x-direction)?
* Point O has an acceleration only in the x-direction since it is traveling in a circular path with a constant speed, giving its acceleration pointing toward the fixed rotation axis.
* Since alpha is in the i-direction and the vector from O to A is in the i-direction, alpha x r_A/O is zero.
* Since omega has only j and k components, and r_A/O is in the i direction, the term omega x (omega X r_A/O) points only in the i-direction.
Adding up these terms gives the acceleration of A of being only in the x-direction.
Not sure if this helps or not.
Looking at the note at the bottom of "Discussion and hints", I see that you're supposed to find a_O. However, isn't it more simple to just set a point (lets call it point C) at the corner of the L-shaped bracket (distance d away from O), and then find acceleration of A by using r_A/C? By doing this, you can just use the angular velocity and angular acceleration calculated in part 1 and plug it into the equation. Instead of two steps, you can just do it in one step from C to A or C to B, which is made possible because its essentially a rigid body (no observer components). To sum it up, if you can see that its essentially a rigid body, why not just go straight from a fixed point C to the point of interest?
You are asking the right questions on these kinds of problems.
Please recall that when you use the following MRF kinematics equation:
v_P = v_C +(v_P/C)_rel + omega x r_P/C
point C must be on the same rigid body as the observer.
If you use an observer on the wheel (as recommended), the you can NOT use the point C that you define above as the reference point in the above equation since C is not on the wheel. Instead, it is recommended that you use point O. The O is on the wheel and the path of O (a circle) is well defined.
Does that make sense?
If you place an observer on the disk, then V rel and A rel for both points A and B will be zero. However make sure to solve for a_o as this is not zero!
Solving this problem, it was very helpful to look through my notes on MRF calculations AND rigid body kinematics. Along with this, finding the acceleration for point O was confusing for me. I believe it is acceptable to use the corner of the bracket as a reference point to calculate this. I used that acceleration in an MRF equation for the accelerations at points A and B. Once I made sure the results of my cross products were the correct signs, I found the rest of the problem simple.
The possible choices for the reference point are dictated by your choice of observer. Specifically, the reference point must be on the same rigid body as to which your observer is attached.
If you put the observer on the L-shaped bar, then you can choose any point on that bar as your reference point. In that case, the corner point on the bracket that you mention above is a valid reference point.
If you put the observer on the disk, then you can choose any point on the disk as your reference point. In that case, you can NOT choose the corner point on the bracket.
Does that make sense?
Wouldn't an observer at point O see A and B rotating about themselves since the bracket isn't rotating about the k direction with the wheel?
It would depend on which point O to which you are referring.
* If it is point O on the L-shaped bracket, the observer sees A and B moving on a circular path.
* If it is point O on the disk, then observer sees motion for neither A nor B.