| Problem statement Solution video |
DISCUSSION THREAD

Ask your questions here. Or, answer questions of others here. Either way, you can learn.
DISCUSSION and HINTS
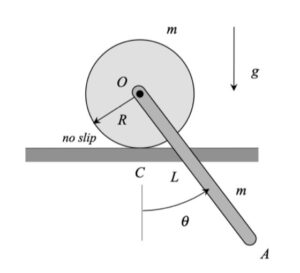
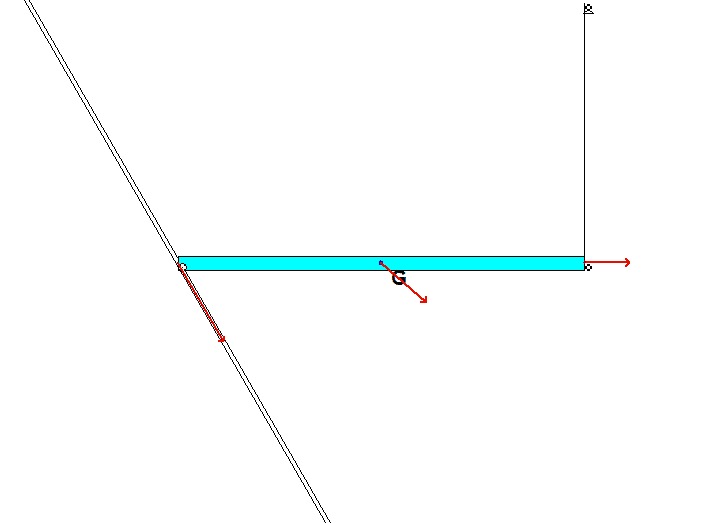
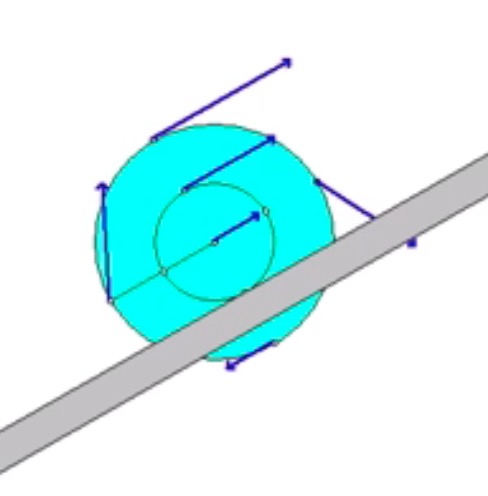
The animation below shows the motion of the wheel as it is being pulled up the incline. The animation shows the velocity of a number of points on the wheel. Think about the location of the instant center for the wheel as it rolls without slipping, and how this location affects the direction and magnitude of the velocities shown here.
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
Draw a free body diagram (FBD) of the wheel.
Step 2: Kinetics (Newton/Euler)
- Looking at your FBD above, which forces, if any, do work that is not a part of the potential energy of the system? Pay particular attention to the friction force at the no-slip point on the wheel – does it do work? How do you find the work done by the applied force F?
- Write down the kinetic energy of the wheel. Recall that the expression the KE for the planar motion of a rigid body is: T = 0.5*m*vA2 + 0.5*IA*ω2, where A is either the center of mass or a fixed point (fixed points include instant centers). So, in this case you can use either O or the no-slip contact point (let’s call that point C).
- Define your gravitational datum line. Write down the potential energy for the wheel.
Step 3: Kinematics
Use the IC approach to relate the velocity of the point on the wheel where the cable comes off (call that point A) to the angular velocity of the wheel. Or, instead, use the following rigid body kinematics equation:
vA= vC + ω x rA/C
Through a time integration of the relationship between the speed of A and the angular velocity of the wheel, you can determine the distance through which F moves.
Step 4: Solve
From your equations in Steps 2 and 3, solve for the angular velocity of the wheel at position 2.