| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints:
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
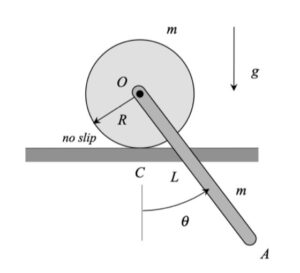
Draw individual free body diagrams for the bar and the disk.
Step 2: Kinetics (Newton/Euler)
Write down the Newton/Euler equations for the disk and for the bar based on your FBDs above.
Step 3: Kinematics
You need to use the rigid body acceleration equations to relate the accelerations of O and the center of mass of the bar, G, through the angular acceleration of the bar. Also, you need to relate the acceleration of O to the angular acceleration of the disk.
Step 4: Solve
Solve your equations for the angular accelerations of the bar and the disk.
Any questions?
Is there a torque on the disk in the FBD due to the bar?
I do not believe that there is a torque on the disk due to the bar since the connection is a pin joint. I am wondering though if the bar can be treated as a two force member?
I do not think the bar can be treated as a two-force member due to the bar having mass m.
Besides the equal and opposite reactions at the shared point O of the two bodies, is there any other forces that needs to be accounted for that relate the two rigid bodies? Is there a torque on the wheel caused by the bar?
Only the reaction forces. No reaction couple at O.
Are the bar and disk rigidly connected?
The bar and disk are not rigidly connected. They are free to rotate independently about the pin joint that connects them.
Does it make sense for the angular acceleration to be zero given you are finding its value immediately after rest?
No, the angular acceleration is not zero, it is what we are solving for. An important related concept is that the angular velocity can be treated as zero for the same reasoning you used.
For the moments equation of the disk it seems that there are no moments around point O. Which would mean angular acceleration of the disk is zero. Is this right?
That just means that the rotation is not about O. Remember that this disk can roll without slipping
I think I am missing a force in my FBD of the bar. What is in the X direction other than the reaction force at O?
Disregard this comment. After posting, I realized that I don't think there should be any other forces.
Do we have to use the reaction forces at O in our equations. If I use them I am left with 7 unknowns but only 5 equations.
I used the reaction forces at O in my equations. You should be able to relate them to other variables which allows you to substitute. I never explicitly solved for them but rather had them in terms of angular accelerations.
After finding the Newton-Euler relations there will be three unknowns missing. These three unknowns can be found with two kinematics equations. One of these kinematics equations will have components in two different directions. With these two equations you will be able to find the three unknowns related to their respective angular accelerations.
Do we include friction in our free body diagram for the disk? And if so how do we find it without the coefficient of friction?
I don't think we include friction in our FBD or force equations, I was able to solve without
I believe we need friction. Using your sum of forces in the x direction and the disk as well as your sum of moments for the disk, you will have two equations to relate, and later on, cancel out f without ever needing to know the coefficient of friction.
***x dir. for the disk, i accidentally types x dir. and the disk
Would the friction force be in the positive x direction?
The friction force would be in the negative x direction it is moving opposite to the motion of the disk.
There's no need to include friction since the disk rolls without slipping on the surface. There's no way for friction to fight against motion at point c since the velocity and acceleration of point c are both 0.
What is the most straightforward way to solve the system of equations?
By combining the sum of forces in the x direction and the sum of moments for the disk, you will have two equations that relate and, subsequently, allow you to cancel out f without ever needing to know the coefficient of friction. This approach provides a solution for the three unknown variables remaining after deriving the Newton-Euler equations, using the two kinematics equations, one of which involves components in two different directions.