| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints:

Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
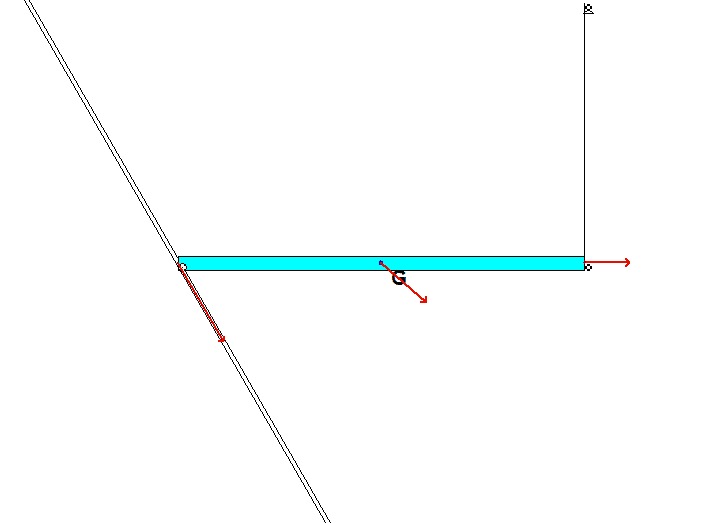
Draw a free body diagram of the bar.
Step 2: Kinetics (Newton/Euler)
Write down the Newton/Euler equations for the bar using your FBD above. Take care in choosing the reference point for your moment equation. In order to use the "short form" of Euler's equation, this point should be either a fixed point or the body's center of mass. For this problem, there are no fixed points.
Step 3: Kinematics
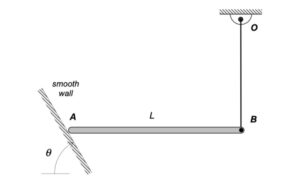
The paths of A and B are known: A travels on a straight path aligned with the inclined wall, and B travels on a circular path centered at O. Since the bar is released from rest, you know that the speeds of A and B are zero - therefore, the centripetal component of acceleration for each point is zero. This leaves the acceleration of points A and B tangent to their paths. (You can see this from the animation above for the instant when AB is horizontal.) It is recommended that you use two kinematics equations: one relating points A and B, and the other relating the center of mass G of the bar to either A or B.
Step 4: Solve
Solve your equations above for the tension in cable BO.
Any questions?
Is there no homework 5.C?
it was just posted
For this problem I found it more useful to solve symbolically then plug in values at the end. The algebra is messy so it is best not to round values in between solving equations.
If we say that By is 0, wouldn’t that mean that the alpha is 0? I cannot seem to get rid of the alpha after doing all of the algebra for the problem.
I am not sure of what you are asking. If you set B_y = 0, then you have removed the influence of the cable in the problem. In that case, no, alpha will not be zero.
If you are asking about if a_By = 0, then, no, alpha will not be zero.
How does the cable constrain the motion of point B? Can we even assume anything about its acceleration in the vertical direction, given that the cable could flex back?
In most (if not all) of the problems we have done with cables, we have assumed that they remain taut. As seen in the animation, this means that the cable looks like a bar. In practice this means that you can assume that the motion of B will be in a circle around O which at this time would be horizontal
The cable does not flex back. The key word in the problem is that the cable is INEXTENSIBLE. This means that right after the bar is released, the bar accelerates to the right and cannot accelerate up at the point of attach. Acceleration in the y would be zero.
For the solve part, is it permissible to show a set up matrix and then give the solution without row reducing? I found doing it this way was convenient.
You are free to use whatever method that you feel is most appropriate in Step 4: Solve. Whatever method that you use, you need to show the details of your steps; that is, do not simply give the answers without showing your work.
Also, keep in mind that you will be asked to do these types of solutions during the exam. It is advisable that you use a method here that works best for you during the exam. That way, you get some practice for the exam.
Would the angular accelerations for the two kinematics set ups be the same? I related points A and B, and G and B.
Since all three of those points are on the same rigid body, yes.
You can solve for the angle between G(COM of rod) and O (can be named phi) by relating it to theta, which is between A and O.
I don't think that is correct. I am not sure what you mean by the angle between G and O since an angle needs 3 points but either way, since we do not no the distance between B and O we cannot determine its position relative to other points
I am having trouble creating enough equations for this problem. Right now I have eight unknowns, those being tension, Agx, Agy, normal force, alpha, Ab, Aax, and Aay. I have only created seven equations. These were three newton euler equations summing force in x and y as well as moment about the center of mass. The there are four kinematics equations, one for a and b separated into components, and one for g and b separated into components. How do I create the last equation?
Please note that the path of point A is known. Since this path is straight (no curvature), the direction of the acceleration of A is along the incline. Therefore, you can write: a_A = a_A*(cos(theta)*i_hat - sin(theta)*j^hat). In other words, you do not have TWO unknowns (a_Ax and a_Ay) but instead have only ONE unknown (a_A).
Does this help?
I am working on solving for N in order to find the tension. I have already solved for alpha in terms of L,g,T,M. I also related a_G = Nsin(theta)/M in the i direction. What other equation should I use to find N?
Please see Andrew Beck's comment above regarding the available equations for you.
Does a_G not have a j component?
Pay attention the trig relationship in this problem, as the normal force at point A is perpendicular to the angled wall. There will be an x and y component of the normal force, with only the y component being relevant in the moment equation.
For this problem's kinematics equations, I used rigid body kinematics to relate the accelerations of A and B. This combined with the fact that the angular acceleration is the same at all points on the bar should provide enough equations to solve for each unknown.
For this problem, after following the hints on the blog, for my kinematics equation relating the motion of A and B, I was able to find an expression for the acceleration of A, as I could set the j components together due to the acceleration of b in the j direction being zero (due to the system being released from rest). From relating the motion of points A and G, my a_A expression could be substituted into the resulting work to find expressions for a_G in the x and y directions that I was able to substitute into the equations made from Step 2.
The solving portion was tricky for me , but I found it much easier to first find expressions for the normal force at point A and the tension force, combine and later find an expression for the angular acceleration. Doing the reverse (equation for alpha then the tension force) led to several algebraic errors on my end, so maybe this order might be of some help for those having issues with Step 4 of the process.
Its helpful to remember to keep all 7 equations in symbolic form when trying to solve before plugging in numbers as this helps simplify the algebra.
I'm still having issues plugging in the equations, any advice for the simplest way to do it?
Also I know the hints kind of explained this, but can someone else explain why the acceleration is only tangent to the path for both A and B?
The hints provided above are based on the path description of acceleration that we covered early in the semester. From what we learned then, we know that acceleration of a point has two components: one component that is tangent to the path, and a second that is normal to the path, with the normal component going as v^2/rho.
Point A travels on a straight path (rho = infinity); therefore, the normal component is zero. Although B travels on a curved path, the speed of B is zero on release; therefore the normal component is zero.
So, for both A and B, the accelerations are tangent to their paths.
Does this help?
Kinematics play a huge role in solving for this problem because after kinetics, you will have 3 equations and 5 unknowns. It will eventually become 7 equations and 7 unknowns which you can then manipulate and solve for T.