| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Discussion
FOUR-STEP PLAN
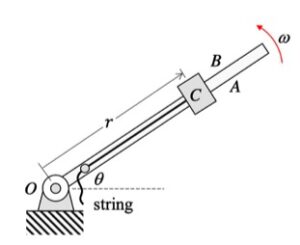
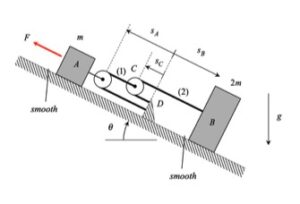
Step 1: FBD – Draw individual free body diagrams of A and B, along with an FBD of pulley C.
Step 2: Newton – From each FBD, write down the Newton’s equation for components along the incline. Recall that the pulley has negligible mass.
Step 3: Kinematics – You will need to use the cable-pulley system kinematics that we worked with earlier in the semester. Please review the material from Section 1.D of the lecture book to relate the accelerations of blocks A and B.
Step 4: Solve – Combine your equations from Steps 2 and 3 to solve for the accelerations of blocks A and B.