| Problem statement Solution video |
DISCUSSION THREAD
We encourage you to interact with your colleagues here in conversations about this homework problem.
DISCUSSION
As always, we should follow the four-step plan:
STEP 1: FBD
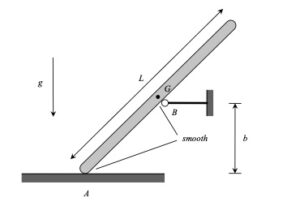
Draw an FBD of the bar. Since the support at B is smooth, the reaction on the bar at B will be perpendicular to the bar.
STEP 2: Kinetics
You should write down the two Newton equations, and the Euler equation. As always, take care in choosing your reference point for Euler’s equation. Since we have no fixed points for the bar, you should choose the center of mass G as your reference point.
STEP 3: Kinematics
Note that the path of the center of mass G is tangent to the surface of the bar (that is, the bar can move only along the support, not into the support). With the bar being released from rest, the acceleration of G is tangent to the path. Specifically, the acceleration of G is directed along the direction of the bar. Write down the rigid body kinematics equation that relates the accelerations of A and G. This vector equation represents two scalar equations (x- and y-components).
STEP 4: Solve
At this point, you will have three kinetics equations and two kinematics equations, for a total of five equations. You will have five unknowns. Solve!
At the instant of release, why must aG point directly along the bar? Since point A is sliding on the floor and the bar is rotating, shouldn’t G be accelerating partially downward or outward?
The tangent to the path of G is along the edge of the bar as the bar cannot penetrate the pin at B. The bar is released from rest, so there can be no normal component of acceleration. All that is left is having the acceleration tangent to the path; that is, it must be along the length of the bar.
I’m confused on how to relate the acceleration of point A to the acceleration of G in the x direction in the kinematics step. I know that point A is constrained in the horizontal direction so that was helpful to simplify my kinematics step in the y direction, but I believe there is some important step I am missing to relate the two in the x direction. Could this have to do with the instant center approach?
Use the standard rigid body acceleration equation (as we did back in Chapter 2):
a_A = a_G + alpha x r_A/G – omega^2*r_A/G
From the discussion above, the acceleration of G is along the length of the bar, and the acceleration of A is along the straight path of A.
Should the equations be done in the cartesian coordinates or would it be better to do it in path coordinates?
Cartesian would be the best.
I am slightly confused. After finding the five equations, I seem to have 6 unknowns, the reaction components of the bar, the angular acceleration, the acceleration components of G, and the acceleration of point A. Am I able to cancel out a variable I am not aware of?
I am having this same issue. It seems as though we are missing something to relate the acceleration of the center of mass to the acceleration of one side such as an instant center approach.
Ah, making aGx and aGy into aGcos(theta) and aGsin(theta) eliminates one unknown as our professor was trying to point out above. We can do this since we know the path of the center of mass which is constrained to the joint at B.
Im not sure what the fifth equation is supposed to be in step 3. I relate the acceleration of A and G, whats the next step?
i think i have realized the answer myself. is it taking the x components and y components of the rigid body acceleration eqn?
Yes, I believe you can split that rigid body acceleration vector equation into two scalar equations along the x and y axes. In addition, another possible fifth equation could be establishing the relationship between the acceleration of point G and the angle of the bar, as shown above, because G must accelerate along the bar.
Should we solve this using Newton–Euler equations with the bar’s instantaneous constraints at A and B, or is there a simpler rigid-body kinematics approach the professor expects?
I believe it is easiest with Newton-Euler.
For this problem, does the bar supporting point B move vertically, or can we assume that is a rigid point? If it is rigid, there would still be a aGx, correct?
I believe point B is fixed. The bar supporting point B should not come up in the solution of the problem. Yes there is a non-zero aGx.
If we use Newton-Euler’s, is it best to take rotation about point A or point G?
I found it best to take the rotation about point G as this seemed to simplify the moment equation.
When writing the moment equation, is there a reason it is cleaner to take moments about G instead of about A? I can make either work in principle, but I’m wondering if one choice avoids introducing extra unknowns.
It decreases the number of terms in your moment equation, because it means that the vector from the point to the center of mass is 0, reducing your moment sum to simply the moment of inertia multiplied by the angular acceleration of the body.
The complication with taking the moment about A instead of G (the center of mass) is that you must now account for the linear acceleration of the bar itself. I think a somewhat intuitive way to think about this could be accelerating a vertical stick sideways while pinching it. If you pinch it at one end, the stick will swing, but if you pinch it at its center of mass, it will not. You must account for the moment that causes the swing if you choose to take the moment about A. Hope this helps.
Since the force at B is always perpendicular to the bar, wouldn’t its direction change as the bar starts rotating? So at the instant of release, are we just treating it as one unknown direction, or do we have to account for that changing direction somehow?
Because the desired angular acceleration is that upon release, we only care about which direction the force is pointing in that instant. If we were trying to determine an expression for the angular acceleration of the bar at any time t, then we would need to account for the change in the angle of the bar from the horizontal surface, but we do not need to worry about that here because we only need the instantaneous angular acceleration.
Because we are only asked to find the angular acceleration on release, we would not have to account for the changing direction of the normal force there. Only the forces that are acting at the instant of release have to be considered. Hope this helps.
If the acceleration of G is tangent to the bar, how can i use that information while setting up the kinematic equation that relates G to A?
When determining the reaction at B, how do we know the exact direction of that force relative to the bar rather than relative to the ground?
It’s smooth so the direction is tangent to the bar
For the reaction at B, you can make a right triangle with theta being the angle between the ground and the bar and a 90 degree angle caused by a vertical line from the ground to G. Using these angles, you can determine the angle between the y axis and the bar, which can be used to determine the reaction forces at B.
What happens to the horizontal acceleration of A? Will the final answer just be in terms of it?
A can move left/right, so a_Ax ≠ 0. But using it as an unknown and a_Ay = 0 you can get the relation of alpha which leads to an answer without a_Ax in it. I’m pretty sure.