| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints:

Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
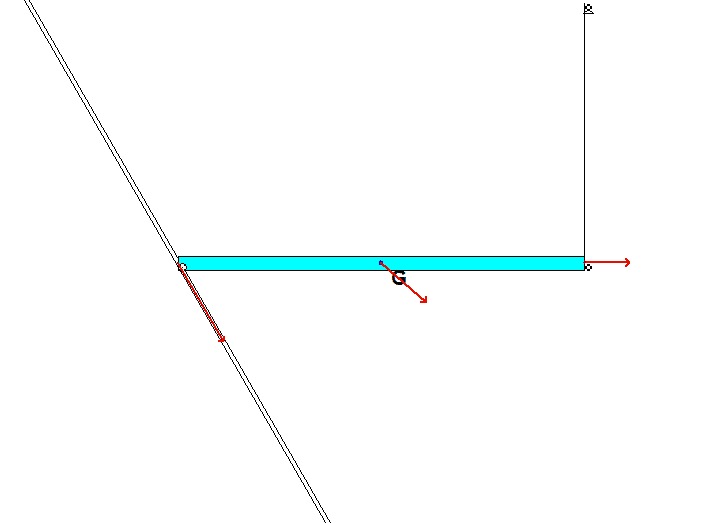
Draw a free body diagram of the bar.
Step 2: Kinetics (Newton/Euler)
Write down the Newton/Euler equations for the bar using your FBD above. Take care in choosing the reference point for your moment equation. In order to use the “short form” of Euler’s equation, this point should be either a fixed point or the body’s center of mass. For this problem, there are no fixed points.
Step 3: Kinematics
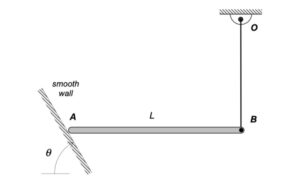
The paths of A and B are known: A travels on a straight path aligned with the inclined wall, and B travels on a circular path centered at O. Since the bar is released from rest, you know that the speeds of A and B are zero – therefore, the centripetal component of acceleration for each point is zero. This leaves the acceleration of points A and B tangent to their paths. (You can see this from the animation above for the instant when AB is horizontal.) It is recommended that you use two kinematics equations: one relating points A and B, and the other relating the center of mass G of the bar to either A or B.
Step 4: Solve
Solve your equations above for the tension in cable BO.
Any questions?
The bar is released from rest, so does Point B have to move purely vertically in that first instant because of the cable, or does the tilt of the wall at Point A force the whole bar to shift sideways?
All you need to recognize in writing the kinematics of motion for A and B is:
* A moves along the straight incline.
* B moves along a circular path centered at O and having a radius equal to the length of cable OB.
Use those two pieces of information in the rigid body acceleration equation for link A in order the get your kinematics for the problem.
Does that mean we have to know the length of the cable to solve the problem? The length is not given, so if so can we assume the hypotenuse of the triangle formed by legs OB and AB is perpendicular to the wall and use trig to solve for the length of the wire?
With the system being released from rest, the length of the cable OB is not relevant. It is only relevant that OB and AB are perpendicular, as given in the problem statement. To see this, give the length of the cable a variable name. Carry that through the analysis, and you will see that it does not appear in your answer.
FYI, the hypotenuse of the triangle OAB is NOT perpendicular to the wall.
Is it safe to describe the acceleration of point B as (i) using cartesian coordinates, or is it better to write it in (theta) using polar coordinates? In this problem, the cable is described as vertical, so cartesian should be applicable immediately after it’s released, right?
Personally, I like the path description the best. Here e_t is horizontal and e_n is vertical. I like path because the system is released from rest (all velocities are zero). Therefore, the centripetal (vertical) component of acceleration for point B is zero. B has only a non-zero component of acceleration in the horizontal direction.
What happens if the length of the cable can actually change and is not rigid? Would we then have to apply relative velocity and acceleration equations as well? Just out of curiosity
The problem that you propose would be a complicated one to solve. You would need to set up the Newton-Euler equations for the bar where here the cable OB would behave like a spring. The consequences of this would be that you would have two nonlinear differential equations of motion to solve because the problem would have two degrees of freedom. In general, you would need to use a numerical differential equation solver.
Not something that we will be doing in this course. 🙂
I solved the problem but I kept getting stuck on a_A, acceleration of A. I solved without finding out what it is. Are we supposed to solve for a_A somehow? Everything in my answer is in terms of a_A right now.
You may not need to actually solve for the acceleration of A; however, the acceleration of A must be part of your solution since you need to provide the kinematics that A is constrained to move along the incline.
We have solved a couple problems of this type in homework and in lecture that require the same kinematics. In those problems we wrote down two acceleration kinematics equations: one between A and B, and one between either A or B and G. Same way here.
The acceleration at either end of the bar as well as at G are all the same in the x-direction, but not identical in the y-direction. Is the acceleration of G in the y needed, or can this problem be solved with only knowing the vertical acceleration of the free end?
I would not spend a lot of time and effort trying to resolve your questions here. Simply write down two rigid body acceleration equations: 1) relating points A and B, and 2) relating either A or B to G. This will give you the kinematics equations that you need to solve.
The kinematics of this problem are very close to that of several problems that we have dealt with in this course: Homework H2.C and lecture book Example 2.A.7.
If the accelerations at A and B are modeled in path coordinates, what is r_B/A?
I believe it is Lî
Is there any tips on methods to check your answer apart from seeing if the sum of forces adds up to mass times net acceleration?
Point A is “stuck” to the incline and point B is “stuck” to a circular arc. At the instant it’s horizontal, B can only move left/right (horizontally) while A has to move down the slope. If you set a_By = 0, the kinematics for angular acceleration and a_Gy fall right into place.