| Problem statement Solution video |
DISCUSSION THREAD
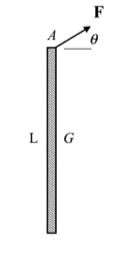
NOTE: The view of the figure provided is that of the rod as seen from above the surface on which the rod lies. Gravity is directed into the screen.
DISCUSSION
This is a straight-forward application of the Newton-Euler equations to a single rigid body moving in a plane. Consider the four-step plan:
1. FBD: Only a single force acting on the body in its plane of motion.
2. Newton/Euler: Use the two components of the Newton equations and one Euler equation for the rigid body:
∑Fx = … = m*aGx
∑Fy = … = m*aGy
∑MG = … = IG*α
3. Kinematics: None needed here.
4. Solve
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
On a frictionless surface, which components of the applied force contribute to translation vs rotation of the rod?
The component of F*cos(theta) makes contributions to both the translation and rotation of the body. The component of F*sin(theta) makes a contribution to only translation.
You will see this once you write down the three Newton/Euler equations of the body.
There will be no mg component in the Fy direction because it is viewed from the top. First, find the sum of forces, then use MG = I alpha to get the alpha value.
To get the components of the acceleration, use the sum of forces in both the x and y directions. The only force acting on the bar is the angled force F. Also, using this force the moment about the bar can be found to then find the angular accel.
Would there ever be a case where the moment of inertia has to be calculated for a more irregular shape like a curved bar or something? How do you approach that?
It is not uncommon for a person to need to do the integration required for finding the mass moment of inertia of a rigid body. For us in this course, we will be solving problems for which we can look up the centroidal mass moment of inertia in the lecture book or online. At the most, we may need to use the parallel axis theorem if we choose some point other than the center of mass for our moment calculations.
I understand the structure of the equations, but I am unsure if there is mGxa because it makes two unknowns instead of just one unknown which is the angular acceleration. Wouldn’t we need kinematics for this problem.
Please look over the three equations suggested above for the bar.
You solve the first equation for a_Gx.
You solve the second equation for a_G_y.
You solve the third equation for alpha.
That’s it. There is no need for additional kinematics to solve.
Is it necessary to convert the force from lb to N?
You can keep the units as lbs, but make sure to convert the gravitational constant to ft/s^2 to keep the units consistent.
I think finding mass in slugs bypasses this.
Should I keep the acceleration vector in terms of its x and y components or take the magnitude?
The question asked for acceleration. Since acceleration is a vector, it is best to provide a vector for your answer.
Is there a specific point on the rod (or extended off the rod) that has an initial acceleration of exactly zero?
There is not. Even if there were, you would need to solve the problem first just to find out.
For the FBD, would their be any reaction forces besides G? Like would there be any at the tip of the rod at A?
Envision the bar lying flat on a smooth horizontal top of a table. F is a force that acts on the bar at end A.
There are no other forces acting on the bar in the plane on which it moves. Gravity is acting perpendicular to the table top so it has no influence on the motion of the bar.
Look at the line of action for each component to see why Fcos(theta) contributes to moment arm relative to the center of mass (G). One component passes directly through G (zero moment arm), while the other has a perpendicular distance. This is why one causes only translation while the other does both