| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Comments are closed.
Why is friction not included in the moment equation (3)?
To what are you referring when you say moment equation (3)?
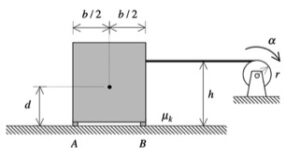
The friction isn’t included because when the box starts to tip, it will sort of be rotating around point B on the box. Since that’s the only part that would be touching the ground all of the friction would be from that point. We take the moment from that point, so it isn’t exerting a torque for the moment.
If the crate is not slipping, how am I able to tell the reaction force at A is 0? Is this like the bicycle in Example 5.A.3?
I mean the crate is not tipping*
The problem is asking for the maximum value of alpha for which slipping occurs with tipping.; i.e., it is asking for the value of alpha for which tipping is impending.
We know the reaction force is zero because as the box tips about point B, it would lift from point A. At the exact moment before it tips that reaction force would be zero since point A is about to lift up.
Is it safe to assume that alpha of the table is the same as alpha of the pulley? I don’t think it is, but it’s the only way I can think to relate the table motion with the pulley motion other than saying that x-direction acceleration of the table is alpha*r.
To what are you referring when you say “table”? There is only one rotating object in the problem: the pulley on the winch. The cable does have an acceleration of r*alpha, if that is what you are asking.
I was referring to the square object and it’s not rotating, but I wanted to know how I should relate alpha of the pulley to the square object, is it that the acceleration of the object in the x direction is the same as alpha*r?
When I solved the problem, setting the sum of forces of the crate in the x direction equal to m * (alpha * r) allowed me to complete the problem. I believe this works because the crate will linearly accelerate at the same rate as the cable. However, I found it easier to complete the question backwards – first using the tipping scenario to calculate the maximum possible tension and then working with the sum of forces on the crate to find alpha.
If the box is about to tip, does that imply that N_a is zero?
Yes! When tipping is impending about corner B, N_A = 0 because the left side of the crate is on the verge of lifting off the ground.
In the FBD, I think the value for NA will equal 0 because the maximum alpha occurs just before tipping, hence, there would be 0 reaction force at point A.
I agree. My logic was that if Na is about to tip, then point A on the box can be considered as instantaneously losing contact with the ground. As a result of this, the force balance in the y direction should indicate that Nb is equal to the entire weight of the box, while Na will be equal to zero due to its imminent loss of contact. Hope this helps.
The value for Na will equal zero when the box is about to tip, so the max acceleration alpha will occur when Na = 0lbf.
for the kinetic diagram why is the acceleration = to alpha*r, when does that apply?
That should always apply (if the reference point isn’t translating/rotating) as a relation between linear and angular acceleration. It comes from the rigid body kinematics equations (in the form alpha x r).
When solving for the angular acceleration alpha of the pulley, do we use another sum of moments equation? If so, how do we know what the moment of inertia of the pulley is? Or are we meant to use a different equation?
The angular acceleration of the winch pulley is a kinematics concern, not kinetics. You need to write down the rigid body kinematics equations from Chapter 2 in order to relate the angular acceleration of the pulley and the acceleration of the cable.
Solving for T first using the moment equation about B is faster. If you sum moments about the tipping point B, you can find the max T that keeps the crate from rotating. From there, you just plug that T into the sum of forces in the x direction equation.
As we have discussed in lecture, you cannot sum moments about B and use the short form of the Euler equation; that is, sum M_B ≠ I_B*alpha. On this problem, you are stuck with using Euler’s equation about the center of mass of the crate.
If the cable were attached lower on the crate, how would that affect the maximum acceleration before tipping?
If the cable were to be attached lower on the crate, the crate is less likely to tip. That is, it would require a larger value of alpha for tipping to occur.
Since the crate is accelerating to the right, why is it valid to use a moment balance about point B without including inertial effects? Shouldn’t we be using a full dynamic moment equation about the center of mass instead?
You are phrasing your question under the hypothesis that it is OK to sum moments about B and still use the short form of the Euler equation. Why are you doing this? You cannot use the short form of the equation when you take the moment about point B since B is neither the center of mass or a fixed point.
I understand that we learned in class that we aren’t able to sum the moments about B, and have to do it about the center of gravity, but is there any method that would allow us to sum the moments about B? I’m thinking that the “force” missing when summing moments about B is the mass of the block and its acceleration (its change in inertia), so why can’t we include that in the moment equation?
Actually, you are free to use ANY point on the rigid body when writing down the Euler equation. However, it is to your advantage to use either:
* the center of mass G (which gives r_G/G = 0), or,
* a fixed point O (a_O = 0), or,
* a point A whose acceleration is parallel to the position vector pointing from that point to the center of mass (r_G/A x a_A = 0)
Choosing any one of those three points causes the second term on the RHS of the Euler equation to be zero. That is to your advantage in simplifying the equation.
However, you are free to choose ANY point on the rigid body that you want, as long as you include that second term.
Would a potential question be how would we set up the inequality to determine if a crate will tip before it ever has a chance to slide
That would be a question that you would see in ME 270 (statics). In this course (dynamics) we focus on problems for which there is acceleration and where inertial forces are relevant in the problem.
When solving for the maximum alpha, how do we know whether to start with the force equations or the moment equation about the center of mass?
My recommendation is to follow the four-step plan. With this plan, the first three steps set up the equations that you have at your disposal for solving the problems: the dynamical equations (Newton/Euler) which come from your FBD and the kinematics equations.
By the time you get to Step 4, you will have written down all of the needed equations. It is simply algebra from that point on. Study the algebraic equations to determine what is the most direct order in which to solve the equations.
Does this help?
If the crate is about to tip about point B, why is it valid to set N = 0, but still assume the crate is not rotating and use alpha = 0?
Suppose that in your FBD you have drawn the normal force on the crate at A (N_A) pointing upward. With this, there are three possibilities:
* N_A > 0: This means that the crate is sliding (no rotation) with both feet in contact with the horizontal surface on which the crate slides.
^ N_A = 0: This means that the crate is sliding (no rotation) with only the foot at B in contact with the horizontal surface on which the crate slides.
* N_A < 0: This means that the foot at A has lost contact with the horizontal surface on which the crate slide and that it has a non-zero CW angular acceleration.
So, by writing N_A = 0, you are specifying a sliding motion with no rotation and with only foot B in contact.
Does this help?