| Problem statement Summary sheet for 2D MRF kinematics-2 Solution video |
DISCUSSION THREAD
We encourage you to interact with your colleagues here in conversations about this homework problem.
Discussion and hints
In order to create the animated GIFs shown below, a problem slightly different that that described in the homework statement has been solved. Here, the rotation rate of omega_OB is not constant, but instead, link OB is oscillating back and forth.
What you should sees from these animations is that the velocity of P as seen by a stationary observer is NOT tangent to the circular guide, whereas the velocity as seen by the observer on OB is tangent to the circular guide. Also, the observed acceleration of P always points to the inside of the circular guide, whereas the acceleration seen by a fixed observer does not always do so.
We need to treat this problem just as we have done for all planar mechanism kinematics in this course. For velocity analysis:
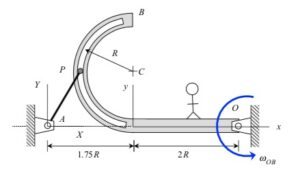
- Write down a rigid body kinematics equation relating points A and P. This vector equation will have one unknown: omega_AP.
- Write down a moving reference frame (MRF) equation kinematics equation relating points P and O. For this equation, it is recommended that you attach an observer onto link OB. This vector equation will have one unknown: v_rel (the velocity of P as seen by the observer on OB). Note that v_rel will be tangent to the circular guide.
- Set the above two velocity equations in terms of v_P equal, and balance coefficients of the xy unit vectors. This will give you two equations in terms of the two unknowns listed above.
For acceleration analysis, repeat the above steps using the rigid body acceleration and MRF acceleration equations. Note that for the MRF equation, the acceleration of P as seen by the observer will have TWO components: one tangent to the circular guide (the observed rate of change of speed, vdot_rel) and one perpendicular to the circular guide (the observed centripetal component of acceleration, v_rel^2/R). In the end, you will have two equations in terms of vdot_rel and alpha_AP.
Would the relative velocity of P be only in the j^ direction because P is directly across from the center of the track?
Yes, that is correct.
Can someone explain to me why we are relating both equations to V_A. V_A is a fixed position therefore, the velocity of V_A should be zero.
Sorry, that was a typo. The MRF equations should be referencing O to P, not to A. It is now fixed.
If we didn't have this animation on the exam(which we won't) then I wouldn't know that the acceleration would be inward towards the center of the semicircle. How would we know this if we didn't have the animation?
Jackson: Think back to the second day of class when we covered the path description of acceleration. Recall from that day the acceleration of a point traveling on a curve path has two components: the tangential component v_dot and the normal component v^2/rho.
Now apply that result to this problem. The observer on OB sees P traveling on a circular path. Therefore, the observer sees a component tangent to that circle (which is unknown) and a component inwardly normal to the circle (which is known).
Then, putting all of the terms together for the acceleration of P using the MRF equation and equating that to the acceleration of P using the rigid body equation from AP, you have enough equations to solve for the two unknowns.
Does this help?
Just to check my work, but the vector Rp/o is (-3Ri+Rj)
Would the speed of v_p be equal to the distance between O and P times w_OB, and then the relative velocity would just be that number in the j direction?
Can we say that acceleration p/o relative is the same as vdot p/o?
No you can't. While you do know that (Vpo)rel is only in the j direction, you do not know that for acceleration relative. What you can do is recognize that the acceleration of p relative to O will have a tangential component and a normal component. That way, you can use each one and separate into components to solve for each one. Hope this helps.
This problem is relatively simple. The only part I found iffy was the rate of change in velocity. For that, I found looking back at homework H1H very helpful
I am confused as to what the angular velocity in the MRF equation should represent since you are relating O and P, but P is moving relative to OB. Would you want to work with omega_OB instead?
Carter: The guiding principle on ALL moving reference frame problems is that "omega" in the MRF equation is the angular velocity of the OBSERVER.
In this problem, it is recommended that you attach your observer to the bar with the slot. The reason for this is that an observer on that reference frame sees a path that is aligned with the slot. For that choice, "omega" is omega_OB*k^hat. Similarly, the angular acceleration alpha is alpha_OB*k^hat.
Does this help?
CMK - Would you agree that the rate of change of P relative to OB is the same thing as the dot product between the acceleration vector of P (relative) and the unit vector of the velocity (relative)?
So, essentially, if I had a velocity in one direction, my dot product would be 1 for the direction of vel, and dotting that with an acceleration vector would mean that the 'rate of change of speed' is just the acceleration ONLY for the direction in which velocity is non-zero?
Should the fractions in our answers reduce down nicely or have I made a mistake somewhere?
Some of your answers will have to be rounded off when you start substituting in the various values.
When solving this question, make sure to know which angular velocity is constant, then you know which angular acceleration should be 0. I find this question similar to 3C but differ in term of which arms is rotating. Hope that helps!
Remember that for problems like these, we have a point that is relative to one point and rigidly connected to another. This means we an form two equations for the points velocity and acceleration, each of which are one MRF equation, and one Rigid Body equation. Then you set those velocities and accelerations equal to each other, and solve for what the question is asking for!