| Problem statement Solution video
|
DISCUSSION THREAD
Animation of motion
Note that as link BD passes through the horizontal orientation, the velocity of B (as well as the angular velocity of AB) instantaneously goes to zero, yet the acceleration of B is not zero. In a couple days when we cover instant centers of zero velocity we will be able to predict when point B has zero velocity.
Solution plan
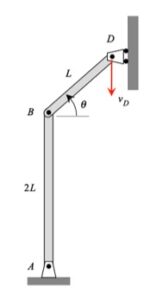
- Note that since D is traveling on a straight line with constant speed, the acceleration of D is zero. Therefore, we can write: a_B = a_D + alpha_BD x r_B/D - omega_BD^2*r_B/D = alpha_BD x r_B/D - omega_BD^2*r_B/D.
- Note that since A is a pin joint, the acceleration of A is zero. Therefore, we can write: a_B = a_A + alpha_AB x r_B/A - omega_AB^2*r_B/A = alpha_AB x r_B/A - omega_AB^2*r_B/A.
- Equate the expressions of a_B from 1. and 2. above. This gives you two SCALAR equations in order to solve for two unknowns, alpha_AB and alpha_BD.
Note that you need to solve the velocity problem first. Follow the above procedure to do so. Here. the velocity of D is known as v_D = -v_D*j_hat.
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
If we visualize point B as following the outer edge of a circle, is the velocity vector always tangent to that circle?
Yes. Since B maintains a constant distance of 2L back to point A, B moves on a circle centered at A and with a radius of 2L. The velocity of B is always tangent to its path, which in this case is the circle.
Since point A is stationary, can we assume that its acceleration and velocity are 0?
Yes, it is safe to assume that the velocity and acceleration of point A is 0, since it is pinned in place.
Does ωAB = ωBA or is it ωAB = -ωBA? Like for the formula, does it matter which way you put it and what is wanted for the answer?
Link AB is a rigid body, so it has one angular velocity.
When solving this problem make sure to check the signs of your final answer and compare it to the animation. The angular accelerations should have the opposite sign of the angular velocities because at the instant shown both angular velocities are decreasing.
When setting your two scalar equations equal to each other, make sure you include the subscripts for omega and alpha to denote if they apply to body AB or BD. The angular acceleration and velocities are not the same for each body so you must have two different variables each for angular velocity and acceleration.
Thanks didn’t know those were different.
When I completed this homework, it was easiest for me to use direction vectors from B to D and from A to B for the equations. Use the equations from the hint and solve with the method where you break parts into vectors that include the 0 components so you can properly solve.
Make sure that you are defining your r vectors with the correct sign. also keep in mind what k direction you define omega and alpha as, the sign for your answers should align to the graphic with this taken into account.
I solved this problem best by setting up systems of equations for angular velocities and accelerations for sections AB and BD, and it worked out nicely for me
Make sure to label the distance vectors correctly as the problem changes by a lot if the vectors are oppositely written.
When solving this problem, I found it most useful to keep in mind that both bodies are joined at b. This allows you to set up the angular velocity equations equal to vb for both bodies. From there you solve for the angular velocities and repeat for angular acceleration.
I believe the units for the answers should be rad/s and rad/s^2, is that correct?
When solving for the angular accelerations, it is very helpful to keep things in variable form for as long as possible, as some will cancel in your final calculations. (Especially your L values)