| Problem statement Solution video |
DISCUSSION THREAD
Discusssion
As you watch the sphere move through its path, focus on a few things:
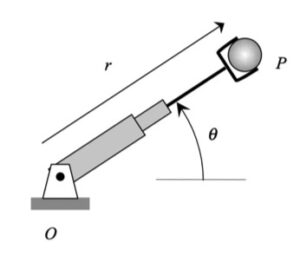
- Direction of the velocity vector. The velocity of the ball is always tangent to the path, as expected. Note that the unit tangent vector e_t points in the same direction as the velocity.
- Direction of the acceleration vector. The acceleration of the ball always points "inward" on the path, again, as expected. When P is slowing down, you see that the acceleration vector points in the negative e_t direction. Similarly, when P is increasing in speed, the acceleration vector points in the positive e_t direction.
- Directions of the polar unit vectors. The e_r unit vector always points outward from point O toward the sphere. The e_θ unit vector is perpendicular to e_r, and in the direction of increasing θ, as seen in the animation above.
Your task is to calculate R, R_dot and R_ddot using the given equation relating R and θ. This will require derivatives with respect to TIME; however, since R is given in terms of θ, you will need to use the chain rule of differentiation. For example: R_dot = dR/dt = (dR/dθ)(dθ/dt).
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
When solving for r' and r'', remember that you're looking for the derivative with respect to time. Since you are given a function for r in terms of theta, you'll have to use chain rule to incorporate theta' wherever there is a theta.
Would the units for velocity be m/s or m-rad/s? I’m not sure where the rad from rad/s in θ_dot would cancel out to make it m/s.
Radians are dimensionless quantities.
What do you mean by dimensionless?
Above, Veronica was making a distinction between m/s and m-rad/sec. Since radians are dimensionless (no units), then those things are exactly the same.
I would recommend starting this problem by writing down your known variables, solving for derivatives, plug in known values, then plugging the results into your velocity and acceleration function last.
This question is pretty straight forward as long as you follow the velocity and acceleration equations described in class. Where
its important to make sure you use the chain rule when finding the derivative for r and being aware of the constants present in problem.
This problem is a fairly direct application of the chain rule. Make sure not to forgot the constants when taking the derivatives for r dot and r double dot. Also be careful not to forget positive and negative signs when evaluating the trig functions for your final answers.
The most helpful thing for me with this problem is setting up my own figure using the variables given in the figure above, because the figure we are given is not reflective of the situation in the problem statement with relation to the angle of the arm, and drawing it in the way that will be easiest to translate your answers in terms of e_r and e_theta will make understanding your velocity and acceleration vectors much easier.
Always a good plan.
This might be a silly question, but how do I find r(t). I know how to find r'(t) and r''(t) using the chain rule, but I need to use r in both the velocity and acceleration vectors. I don't think that would be the same as r(theta) which is given, but I might be overthinking it.
You simply need to substitute theta = pi/2 into the expression for r. This gives: r = R_0 - R_1
Two things on this problem: Notice you are in radians! That means that the angles can be computed rather nicely considering theta is given in terms of pi. Also with the chain rule of differentiation (which you have to use on r since it is given in terms of theta rather than t), you end up with a theta over t term, which translates to the change of theta over time! That definition should sound familiar.
When solving for r'' from r', will you need to use the product rule?
I believe you can use the product rule or chain rule
Is the theta in the problem the one we use for the formula or do you use the theta measured from the j vector (y axis) instead?
For a general problem, we are free use any angle, so long as you define the angle at the start, and stick with that throughout.
For this problem in particular, the angle theta has been defined for us as being measured counter-clockwise from the positive x-axis. This sets the direction for the e_theta unit vector, and the sign conventions for theta_dot and theta_ddot.
We use the theta given at the bottom of homework 1.E, where the parameters are defined. Theta is defined as pi/2 in radians. Additionally, when using theta in this problem remember that sin(pi) = 0 and cos(pi/2) = 0.
Something that has been helping me breakdown the components needed to solve for velocity and acceleration is actually writing out how the chain rule of dr/dt = dr/dtheta * dtheta/dt. So when doing this I derive the function inside of sine at the end. It is also importnat to plug in numbers right at the very end so you don’t mess up signs, variables, and other things.
This also comes to show results when doing the product rule for a component in the acceleration solution. Things in this problem cancel out easily without a need to overcomplicate, try plugging in the angles before going through messy calculations.
Pay attention to the fact that theta dot is a constant in the given, this comes in handy for later derivation and cancelling unnecessary terms.
It is important to do your derivatives correctly because it is very easy to forget constants and signs. I would suggest doing all derivatives with variables first, and then later plugging in all given values instead of trying do it in one step.
The units for velocity and acceleration should both be in m/s or m/s^2 because velo and accel both have a length quality to them.
I found r dot through the chain rule and got sin(2theta) multiplied by a few numbers. When I try to plug values in, I get a 0 since sin(pi) is 0. Can someone point out what I might've done wrong?
Tanya: Why do you feel that you have done something wrong? Your math that leads to r_dot = 0 looks fine. Take a look at the animation of the problem for the angle of theta = pi (when P is directly to the left of O). At that point, the radial distance r has reached its MAXIMUM - therefore, r_dot = 0, which is in agreement with your analysis.
to find r double dot (needed for acceleration), you must differentiate r dot with respect to time, but you need to remember to use both the chain rule and the product rule.
Why is the acceleration only in the e_r direction and velocity only in the e_theta direction?
Please review the solution video.
* At theta = pi/2, r_dot is zero.
* Therefore, the e_r component of velocity is zero, leaving only an e_theta component for velocity.
* It is given that theta_dot = constant; therefore, theta_ddot = 0. That, along with r_dot = 0, makes the theta component of acceleration zero, leaving only an e_r component for acceleration.
Does this make sense?
This problem is a very fundamental velocity and acceleration problem. First write out all variables that are needed in each equation and identify what is given and what can be found from derivatives. Remember again to use the chain rule when doing derivatives.