


Graduated Site of the NSF Center on RObots and SEnsors for the HUman well-Being
The NSF RoSe-HUB center is a multi-university Industry/University Cooperative Research Center, or I/UCRC, that works on a collaborative, medium-term research agenda addressing the development of robots and sensors for human assistance, home healthcare, agRobotics, emergency response, high-consequence materials handling, and manufacturing at small, medium and large scales. Purdue is a graduated site of RoSe-HuB.
This material is based upon work supported by the National Science Foundation under Grant Nos. 1439717 and 0841483.
Please click the image to examine our brochure on Collaborative Robotics: 
Upcoming Meetings
Purdue no longer participates in the center meetings, so see the Robotics Seminar page for other meetings of interest.Projects
Projects under the Purdue RoSe-HUB site are proposed by faculty, in consultation with industry members, voted on the Industrial Advisory Board, and funded by the Executive Board of the member universities. This ensures strong collaboration and buy-in from both industry and the faculty researchers.
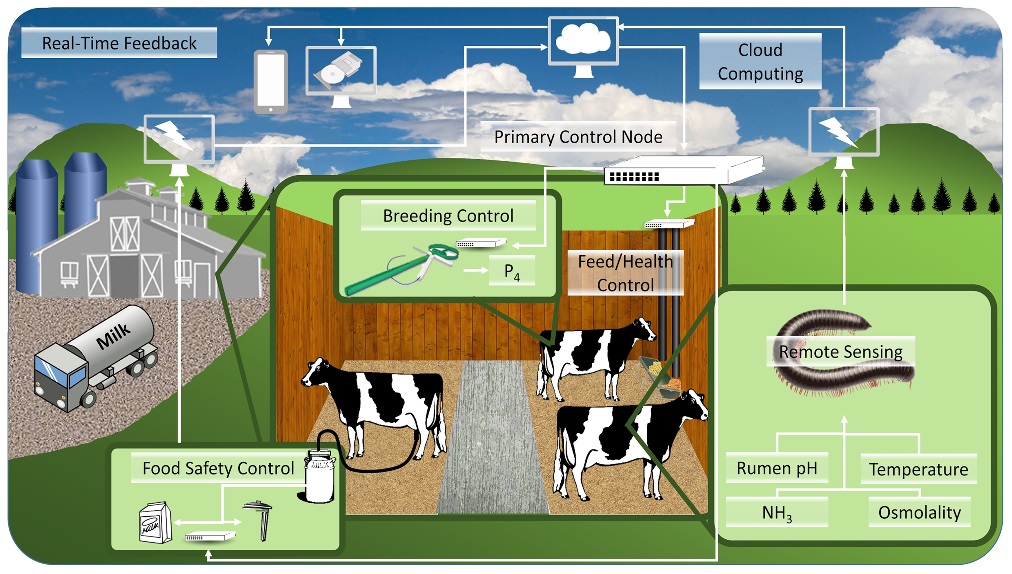
Precision Dairy Agriculture Sensors
PIs: Robert Nawrocki, Purdue; Richard Voyles, Purdue; Brittany Newell, Purdue
|
| Current state-of-the-art of dairy farming is technologically advanced, but based primarily on average information. The Precision Dairy Farm of the Future will be based on individual animal data, just like the small family farm of the past, but across the vast herds of today. |
Hot Zone Sampling with Long-Distance UAVs and UAV Swarm
PIs: Dave Cappelleri, Purdue; Richard Voyles, Purdue; Shoushuai Mou, Purdue
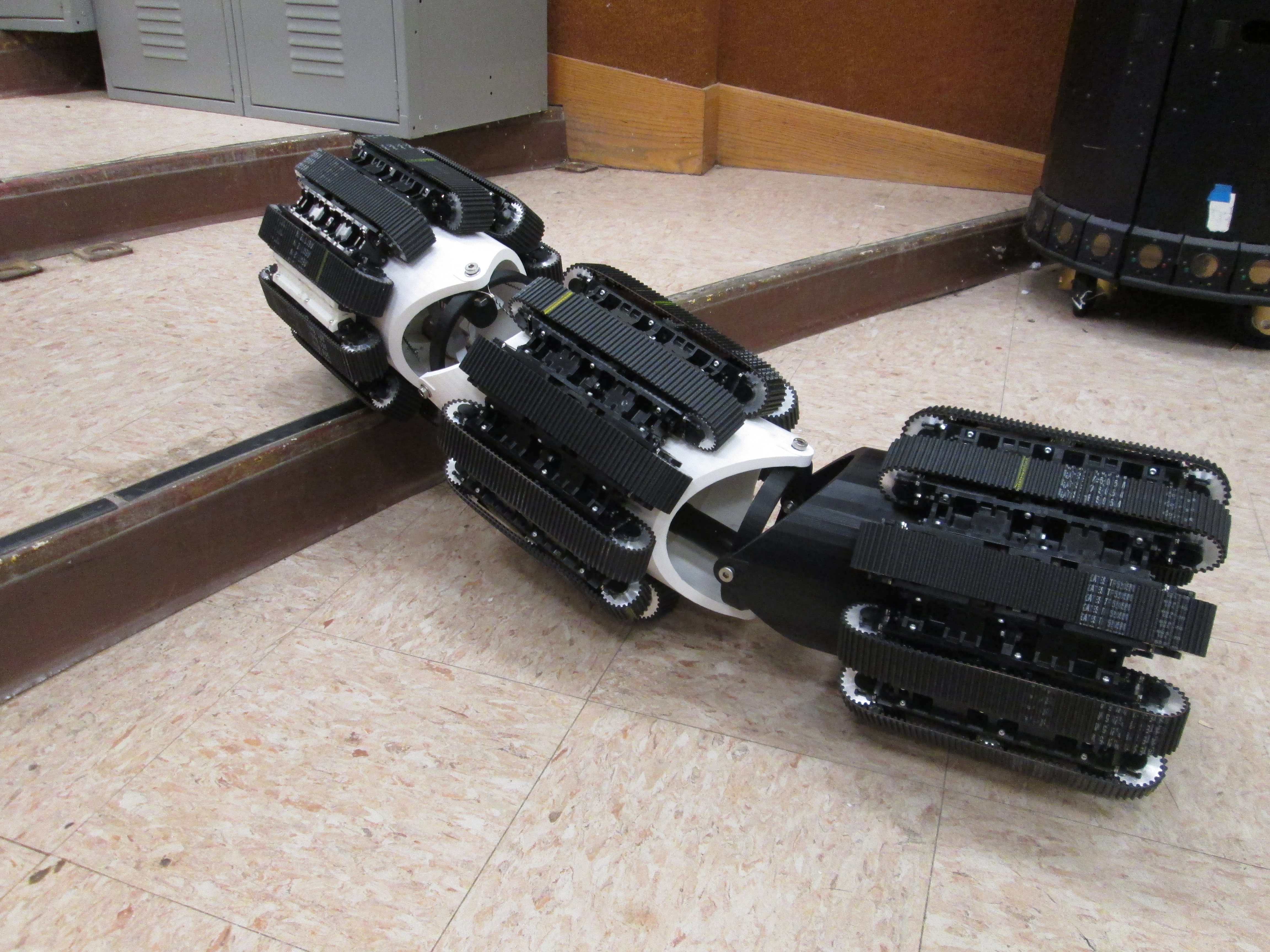
Modular Serpentine Robots with Reconfiguration
PIs: Richard Voyles, Purdue; Howie Choset, Carnegie Mellon
The MOTHERSHIP represents a new class of hybrid ground robot that combines treads, limbs, and serpentine locomotion.
MOTHERSHIP - Modular Omnidirectional Terrain Handler for Emergency Response, Serpentine and Holonomic for Instantaneous Propulsion
This novel robot was developed as part of an instrument developed under NSF MRI 1450342 and is used by projects in the NSF Center for Robots and Sensors for the Human Well Being (RoSeHUB) NSF 1439717.
Awesome YouTube Video of MOTHERSHIP in action!!
|
| MOTHERSHIP on stairs in the Collaborative Robotics Lab |
Robotic Handling of High-Consequence Materials
PIs: Richard Voyles, Purdue; Nikos Papanikolopoulos, Minnesota
|
| Team that performed at the DOE Science of Safety Exhibition |
Flexible Displays for Kitchen IOT
PIs: BC Min, Purdue; Richard Voyles, Purdue
SuperBaxter: Next Generation Collaborative Robot for Manufacturing
PIs: Juan Wachs, Purdue; Richard Voyles, Purdue
|
| Super Baxter is a next-generation collaborative robot based on existing technologies from Rethink Robotics and Barrett Technology, coupled with the Purdue/DU physical avatar for natural human interaction. |
Cyber Physical Systems with Multi-Robots for Persistent Water Monitoring
PIs: BC Min, Purdue; Richard Voyles, Purdue
|
| Contaminants in our lake bottoms and river beds can be highly toxic and the sediments found are a bellwether of future health. We are examining, with the NEXUS Institute, robotic sampling systems to make the testing of these precious ecosystems easier and more frequent, so we know the state of health of our fresh water systems. |
Industry and Government Partners








Publications
- Sesha N. Charla, Bin Yao, Richard M. Voyles, "On Enhancing the Bandwidth of the Actuator Dynamics in a Multi-rotor Aerial Vehicle," IFAC-PapersOnLine, v. 55, n. 37, 2022, Pages 536-541, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2022.11.238.
- S. Eom, H. Zhou, U. Kaur, R. M. Voyles and D. Kusuma, "TupperwareEarth: Bringing Intelligent User Assistance to the "Internet of Kitchen Things", in IEEE Internet of Things Journal, vol. 9, no. 15, pp. 13233-13249, 1 Aug.1, 2022, doi: 10.1109/JIOT.2022.3141112.
- H. Bai, K. Vyshniakova, E. Pavlica, A. Yiannikouris, T.R. Yerramreddy, R.M. Voyles, R.A. Nawrocki, Organic Electrochemical, PEDOT:PSS-Based Impedimetric Histamine Sensor, in 18th International Meeting on Chemical Sensors (IMCS 2020), May 10-14, 2020.
- J.H. Bae, S. Luo, S.S. Kannan, Y. Singh, B. Lee, R.M. Voyles, M. Postigo-Malaga, E.G. Zenteno, L.P. Aguilar, B.C. Min, Development of an unmanned surface vehicle for remote sediment sampling with a van veen grab sampler, in MTS/IEEE OCEANS 2019, Seattle, Oct. 2019.
- J.H. Bae, W. Jo, J.H. Park, R.M. Voyles, S.K. McMillan, B.C. Min, Evaluation of Sampling Methods for Robotic Sediment Sampling Systems in IEEE Journal of Oceanic Engineering, Aug, 2020.
- M.M. Rahman, N. Sanchez-Tamayo, G. Gonzalez, M. Agarwal, V. Aggarwal, , R.M. Voyles, J. Wachs, "Transferring Dexterous Surgical Skill Knowledge between Robots for Semi-autonomous Teleoperation", in 28th IEEE Intl Conf on Robot and Human Interactive Communication (RO-MAN 2019), New Delhi, India, Oct., 2019.
- M.V.S.M. Balakuntala, V.L.N. Venkatesh, J.P. Bindu, R.M. Voyles, J. Wachs, "Extending Policy from One-Shot Learning through Coaching", in 28th IEEE Intl Conf on Robot and Human Interactive Communication (RO-MAN 2019), New Delhi, India, Oct., 2019.
- S. Eom, R.M. Voyles and D. Kusuma, "Embedding Intelligence into Smart Tupperware Brings Internet of Things Home," in SPE Annual Technical Conference, Detroit, MI, Mar., 2019.
- M. Ayad, N.R. Aghamohammadi, R. Nawrocki, R.M. Voyles and D. Kusuma, "Designer Polymers: Additive Manufacturing of Smart Materials as a Complement to Injection Molding," in SPE Annual Technical Conference, Detroit, MI, Mar., 2019.
- Voyles, R., Chun, W., Hamel, W., Krovi, V., Padir, T., Pryor, M., Santos, V., Sweet, L., Townsend, M., "State-of-the-Art of Robotic Handling of High-Consequence Materials - Nuclear Waste," Technical Report, Mar., 2018.
- Wheeler, J., Rimando, R., Chun, W., Dixon, P., Hamel, W., Harden, T., Heermann, P., Kriikku, E., Lee, J., Mehling, J., Minichan, R., Nance, T., Voyles, R."DOE Robotics Roadmap 2018," Technical Report, Mar., 2018.
- T. Soratana, M.V.S.M. Balakuntala, P. Abbaraju, R. Voyles, J. Wachs, M. Mahoor, "Glovebox Handling of High-Consequence Materials with Super Baxter and Gesture-Based Programming - 18598", in Waste Management (WM 2018), 44th International Symposium on, Phoenix, AZ, Mar., 2018.
- P. Abbaraju, R. Voyles, "Sensing and Sampling of Trace Contaminations by a Dexterous Hexrotor UAV at Nuclear Facilities - 18600", in Waste Management (WM 2018), 44th International Symposium on, Phoenix, AZ, Mar., 2018.
- Voyles, R., Abbaraju, P., Choset, H., Ansari, "Novel Serpentine Robot Combinations for Inspection in Hard-to-Reach Areas of Damaged or Decommissioned Structures," in Waste Management (WM 2017), 43rd International Symposium on, Phoenix, AZ, Mar., 2017.
- Jiang, G., Voyles, R. Cappelleri, D., McArthur, D., Mou, S., Yertay, A. Bean, R. Abbaraju, P., Chowdhury, A., "Purpose-Built UAVs for Physical Sampling of Trace Contamination at the Portsmouth Gaseous Diffusion Plant," in Waste Management (WM 2017), 43rd International Symposium on, Phoenix, AZ, Mar., 2017.
- Cabrera, M.E., Sanchez-Tamayo, N., Voyles, R., Wachs, J.P., "One-Shot Gesture Recognition: One Step Towards Adaptive Learning," in Automatic Face & Gesture Recognition (FG 2017), 12th IEEE International Conference on, 2017.
- Bae, Jun Han and Park, Jee H., Lee, S., Min, BC, "Tri-SedimentBot: An underwater sediment sampling robot," in Automation Science and Engineering (CASE), 2016 IEEE International Conference on, 2016.
- Guangying Jiang, Richard Voyles, Kenneth Sebesta, Helen Greiner, " Mock-up of the exhaust shaft inspection by dexterous hexrotor at the DOE WIPP site," in IEEE Symposium on Safety, Security and Rescue Robotics, 2015.
- Joshua Lane, Richard Voyles, " A 2-D tread mechanism for hybridization in USAR robotics," in IEEE Symposium on Safety, Security and Rescue Robotics, 2015.
- M Ayad, R Voyles, J Bae, "Locally selectable protocol for sparse, highly-volatile, robotic wireless video sensor networks," in International Journal of Sensor Networks. 20 (2), 70, 2016.
- Y Cui, JT Lane, RM Voyles, " Real-time software module design framework for building self-adaptive robotic systems ," in IEEE/RSJ Conf on Intelligent Robots and Systems, 2015.
- Y Cui, RM Voyles, JT Lane, A Krishnamoorthy, MH Mahoor, "A mechanism for real-time decision making and system maintenance for resource constrained robotic systems through ReFrESH," in Autonomous Robots, v. 39, n.4, 487, 2015.
Related Publications from NSF SSR-RC
- R.A. Nawrocki, X. Yang, S.E. Shaheen and R.M. Voyles, "Structured Computational Polymers for a soft robot: Actuation and cognition," in Proc. of the 2011 IEEE Intl. Conf. on Robotics and Automation, v. 1, pp. 5115-5122.
- R.A. Nawrocki, S. Shaheen, X. Yang, and R.M. Voyles, "Towards an All-Polymer Robot for Search and Rescue," in IEEE Workshop on Safety, Security and Rescue Robots, Denver, CO, Nov., 2009.
- X. Yang, R.M. Voyles, K. Li and S. Povilus, "Experimental Comparison of Robotics Locomotion with Passive Tether and Active Tether," in IEEE Workshop on Safety, Security and Rescue Robots, Denver, CO, Nov., 2009.
- R.M. Voyles and R. Godzdanker, " Side-Slipping Locomotion of a Miniature, Reconfigurable Limb/Tread Hybrid Robot," in IEEE Workshop on Safety, Security and Rescue Robots, Sendai, Japan, Oct., 2008, pp. 58-64.
- R. Godzdanker and R.M. Voyles, " Steering Control of an Active Tether Through Mass Matrix Control," in IEEE Workshop on Safety, Security and Rescue Robots, Sendai, Japan, Oct., 2008, pp. 128-133.
- R. Voyles and J. Bae, " The Gestural Joystick and the Efficacy of the Path Tortuosity Metric for Human/Robot Interaction," in PerMIS, Gaitherburg, MD, Aug., 2008.
- R. Godzdanker and R. Voyles, "Non-Isomorphic Tread Design for a Side-Slipping Tread/Limb Hybrid Robot," in SICE, Tokyo, Japan, Aug., 2008, pp. 1008-1012.
- R. Voyles and J. Bae, "The Gestural Joystick and the Efficacy of Path Tortuosity in Rubbled Environments," in SICE, Tokyo, Japan, Aug., 2008, pp. 992-996.
- A.C. Larson, G.K. Demir, and R.M. Voyles, "Terrain Classification Using Weakly-Structured Vehicle/Terrain Interaction ," in Autonomous Robots, v. 19, pp. 41-52, 2005.
- A. Larson and R. Voyles, "TerminatorBot: A Novel Robot with Dual-Use Mechanism for Locomotion and Manipulation," in IEEE/ASME Transactions on Mechatronics, v. 10, n. 1, pp. 17-25, 2005.
- R.M. Voyles, A.C. Larson, M. Lapoint and J. Bae, " Core-Bored Search-and-Rescue Applications for an Agile Limbed Robot," in Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, v. 1, pp. 58-63.
- R.M. Voyles, A.C. Larson, K.B. Yesin, B. Nelson, "Using Orthogonal Visual Servoing Errors for Classifying Terrain," in Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, v. 1, pp. 772 - 777.
- R.M. Voyles, "A Mesoscale Mechanism for Adaptive Mobile Manipulation," in Proceedings of the ASME Dynamic Systems and Control Division, ASME Annual Meeting, v. 2, pp. 957-964.
- R.M. Voyles, "TerminatorBot: A Robot with Dual-Use Arms for Manipulation and Locomotion," in Proceedings of the 2000 IEEE International Conference on Robotics and Automation, v 1, pp. 61-66.
- K. Yesin, B. Nelson, N. Papanikolopoulos, R. Voyles and D. Krantz, "Active Video System for a Miniature Reconnaissance Robot" in Proceedings of the 2000 IEEE International Conference on Robotics and Automation, v 4, pp. 3920-3925.
Robotics Sources
Distributed Robotics Source ListAny opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Copyright: © 2016-2019,2023 by Richard M. Voyles
rvoyles [at] purdue [dot] edu