| Problem statement Solution video |
Note: Due to the weather-related changes in the course this week, the submission of this problem can be delayed until 11:59PM on Friday, January 30.
DISCUSSION THREAD
We encourage you to interact with your colleagues here in conversations about this homework problem.
Discussion and hints:

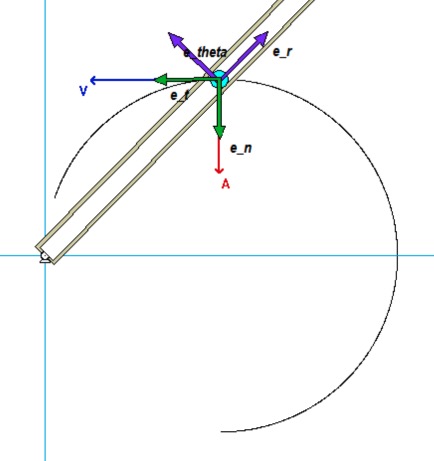
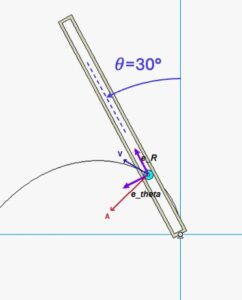
Enlarged view
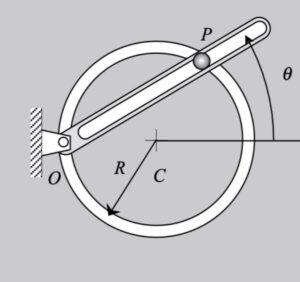
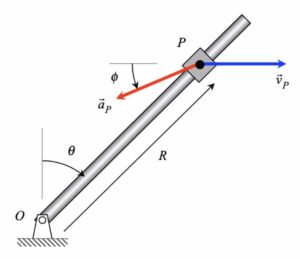
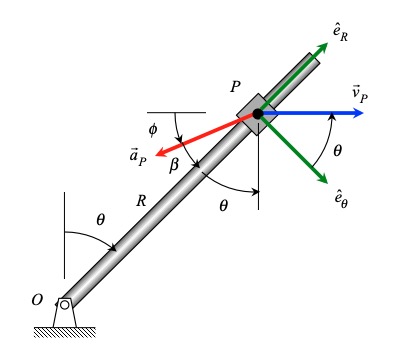
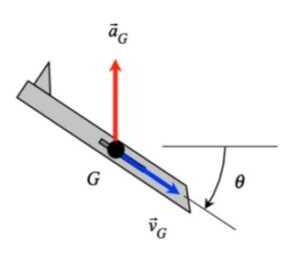
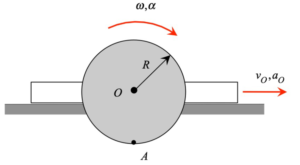
This problem is a straight-forward application of the planar rigid body kinematics equations. The velocity and acceleration of the center of the disk are known, as well as the angular velocity and angular acceleration of this disk. To find the velocity and acceleration of point A on the disk, you can use the following:
v_A = v_O + omega x r_A/O
a_A = a_O + alpha x r_A/O – omega^2*r_A/O
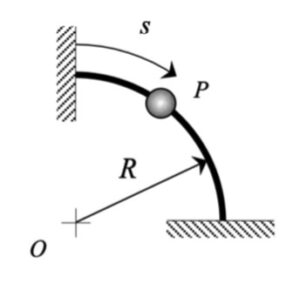
Using the enlarged view above, we can see the interplay between velocity (blue) and acceleration (red) of point A. Using what we learned back in Chapter 1, can you identify times when the speed of A is increasing and when it is decreasing? (Hint: Look at the angle between the velocity and acceleration vectors.) Using the top view, we can see the path of point A – is that the path that you expected for A?