| Problem statement Solution video |
DISCUSSION THREAD
Ask or answer questions here. You can learn from either.
DISCUSSION and HINTS
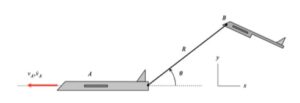
Since the cable does not stretch (R_dot = R_ddot = 0), an observer on aircraft A will see a circular path for B, although the true path of B is more complicated than that. Since θ_dot = constant, then θ_ddot = 0.
It is recommended that you write down the relative motion kinematics equations relating the motions of A and B:
vB = vA + vB/A
aB = aA + aB/A
and use a set of polar coordinates to describe vB/A and aB/A:
vB/A = R_dot*eR + R*theta_dot*eθ = R*theta_dot*eθ
aB/A = (R_ddot - R*theta_dot^2)*eR + (R*theta_ddot +2*R_dot*theta_dot)*eθ = - R*theta_dot^2*eR
Just a minor correction for the simplified acceleration vector (of B with respect to A) given in the Discussion and Hints section above: a minus sign is missing from the final result:
aB/A = (R_ddot - R*theta_dot^2)*eR + (R*theta_dot +2*R_dot*theta_dot)*eθ
= (-)R*theta_dot^2*eR
Isn't the eθ term supposed to be R*theta_ddot + ... not R*theta_dot?
Thanks for pointing out the typo.
When solving this problem, be sure to focus on the directions and signs. The base cartesian coordinate axis is shown (positive i_hat to the right and positive j_hat upwards). This should make an impact on your signs and solution.
When using theta_dot in your equations, do we need to convert radians to degrees? I noticed that theta was given in terms of degrees.
No, your numbers for theta_dot need to be in radians.
Ultimately, it wouldn't matter if theta was given in degrees or radians because we are computing the sine or cosine which will end up with no units. What matters is that theta_dot is given in rad/s which makes sense for the units in your final answer. If theta_dot was given in degrees, you would have to convert it to radians to produce the desired units of the final answer.
When calculating the acceleration in b, remember to consider the effects of both the increasing speed of aircraft A and the changing angle of the towline
Remember to stick to one coordinate system when solving and to convert as needed.
Shouldn't the velocity of A just be broken into components to get the velocity of B with both being in terms of i and j? I don't understand the need for relative velocity between the both of them.
The velocity of A has only an x-component. The velocity of B has both x- and y-components. To find the velocity of B, add to the velocity of A the velocity of B relative to A. The motion of B relative to A is circular, which you find out from its polar description above.
Are we supposed to assume that R_dot is zero because R is constant?
Yeah, it can be assumed that the tow cable is of a fixed length, since it doesn't say otherwise. This also means that r_ddot is 0 along with r_dot
We can also then say theta_ddot is 0 because theta_dot is constant.
I found it helpful to draw a diagram of the different unit vectors in the problem to convert between them
How do you know to what direction to set unit vector e^theta to get the velocity in Cartesian? Is it always in the direction of positive motion and perpendicular to e^r?
e_theta is ALWAYS in the direction of increasing theta, regardless of the actual motion.
Remember that e_r needs to be in the same direction as the vector from A to B.
For this problem watch out for what the problem is asking you to find. I made the mistake of initially giving V_b/a and A_b/a as an answer but instead the question is asking for V_b and A_b.
There are two possible ways to do this problem, being the method provided to us as well as a method using the geometry between the two planes and cable.
I am confused as to why we would want to find v_b and a_b as the answer instead of v_a/b and a_a/b since we r looking at a point attached to A. Can someone please explain?
Make sure to conver e^r and e^θ into ^i and ^j.
e^r : cosθ ^i + sinθ ^j
e^θ : -sinθ^i + cosθ^j
This information will help you out for solving this problem.
For this problem, sign convention is very important because it matters which direction both of the planes are in when calculating for the result. It is also helpful if a e_r and e_theta guidelines are drawn along with i and j vectors.
Throughout this problem you must pay particular attention to both the sign conventions and the path description (polar, cartesian, or path). Page 53 in the textbook shows a good explanation that is useful in this problem. Furthermore, do not forget that the velocity of Vb = Va + Vb/a same goes for the acceleration.
The curvature of a line is 0 correct, not 1?
Does the coordinate system we answer the question with matter?
Does it matter if the velocity and acceleration vectors are in terms of e_r and e_theta or i and j?
if you are asking about the final answer, It technically does not matter. Still, in my opinion, it is easier to convert the e_r and e_theta of v_b/a and a_b/a to i and j so that you can use v_a and v_dot_a (which are given to be in the -i direction) in your calculations at the end when you are adding them to v_b/a.
In my opinion it is easier to do this problem in polar. Make sure you know r dot and r ddot are both zero, as this will cancel out a big part of the vba and aba equation. Measure theta from the right side as it is increasing from there.
For this problem you must solve for velocity and acceleration with respect to glider A, and then use the relative motion kinematic equations to obtain the actual velocity and acceleration.