| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
You must be logged in to post a comment.
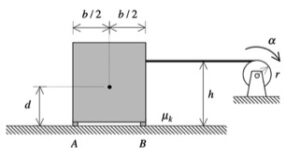
Why is friction not included in the moment equation (3)?
To what are you referring when you say moment equation (3)?
If the crate is not slipping, how am I able to tell the reaction force at A is 0? Is this like the bicycle in Example 5.A.3?
I mean the crate is not tipping*
The problem is asking for the maximum value of alpha for which slipping occurs with tipping.; i.e., it is asking for the value of alpha for which tipping is impending.
Is it safe to assume that alpha of the table is the same as alpha of the pulley? I don’t think it is, but it’s the only way I can think to relate the table motion with the pulley motion other than saying that x-direction acceleration of the table is alpha*r.
To what are you referring when you say “table”? There is only one rotating object in the problem: the pulley on the winch. The cable does have an acceleration of r*alpha, if that is what you are asking.
I was referring to the square object and it’s not rotating, but I wanted to know how I should relate alpha of the pulley to the square object, is it that the acceleration of the object in the x direction is the same as alpha*r?
When I solved the problem, setting the sum of forces of the crate in the x direction equal to m * (alpha * r) allowed me to complete the problem. I believe this works because the crate will linearly accelerate at the same rate as the cable. However, I found it easier to complete the question backwards – first using the tipping scenario to calculate the maximum possible tension and then working with the sum of forces on the crate to find alpha.
If the box is about to tip, does that imply that N_a is zero?
Yes! When tipping is impending about corner B, N_A = 0 because the left side of the crate is on the verge of lifting off the ground.
In the FBD, I think the value for NA will equal 0 because the maximum alpha occurs just before tipping, hence, there would be 0 reaction force at point A.
I agree. My logic was that if Na is about to tip, then point A on the box can be considered as instantaneously losing contact with the ground. As a result of this, the force balance in the y direction should indicate that Nb is equal to the entire weight of the box, while Na will be equal to zero due to its imminent loss of contact. Hope this helps.
The value for Na will equal zero when the box is about to tip, so the max acceleration alpha will occur when Na = 0lbf.
for the kinetic diagram why is the acceleration = to alpha*r, when does that apply?
That should always apply (if the reference point isn’t translating/rotating) as a relation between linear and angular acceleration. It comes from the rigid body kinematics equations (in the form alpha x r).