| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
Comments are closed.
In order to solve this problem, it would be useful to review base excitation which can be found on page 416 in the book. It would also be helpful to look at problem 6.C.4 which we covered in class.
For this question, its important to consider the moment from the no slip point in order to cancel out the effects of friction in the moment equation.
This problem is almost identical to Example 6.C.4 from the lecturebook. It is important to remember the usage of kinematics to relate the x coordinate and its derivatives to theta and its derivatives. When dealing with the sum of moments around a no-slip point, make sure to use the parallel axis theorem to find the moment of inertia around that point.
It can be nice in the problem to take the moment about the bottom of the disk to avoid having friction as a force that effects it. We have done this many other homework's.
Based on the FBD, it is smart to sum up moments about the no slip point, which allows you to ignore the friction force at that point. For my kinematics equation, related the no slip point to O in order to relate the theta and x variables and their derivatives to each other.
Converting the x-components of the differential equation to theta using x = R*theta helps derive the EOM in terms of theta which helps when proceeding to theta_p in the particular solution.
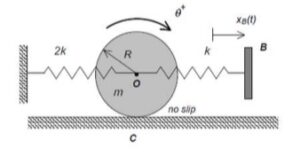
A good way to make sure the direction of the base extension spring force is correct is to once again draw a system where displacement in x_b is larger than x. Once this is done, it is easy to tell the force will be to the right.
Is the base B able to move in the y direction? The problem doesn't say it has any vertical motion but the diagram makes it look like it's not being supported in the y direction.
The base B is assumed to not move in the y direction as there are no forces in the y while also not having an equation of motion in the y direction.
The base B is more of an idea than a real object in the system. The rectangle represents a displacement of the spring due to some other factor which is not known within the context of the problem. You could think of this as another body that is infinitely larger than the bodies in the system, so much that this body's motion is unaffected by the spring force.
I appreciate what you are saying; however, the base B is actually a body. That body "B" is given a prescribed displacement in time of x_B(t). The actual size or mass of the body is not relevant in terms of the motion of disk. The size does matter in terms of the force that must be applied to B to get this prescribed displacement vs. time. Typically, the more mass that B has, the larger the force that must be applied to it in order get that motion.
In the Kinetics, it can be helpful to sum the moments about the no slip point. This is useful since it allows for friction to be ignored.
In order to solve this problem, I applied the techniques used to solve 6.C.4, the most important of which was taking the sum of the moments around the no-slip point, as this removed many of the troublesome factors.
As stated above this problem is very similar to 6.C.4 from the lecture book. One thing to keep in mind is that x_b(t) is already given and the particular solution is given in the form of Asin(omega t) so we can easily point out that there is no cosine term in the answer.
When solving this problem, the moment is considered about the no-slip point. Due to this, it is important to use the parallel axis theorem to find the value of I.
When drawing the Free Body Diagram for this problem, it is not important whether you draw the friction force to the left or the right.
Yes I agree with this, because later on you will take the moments around the no-slip point which will eliminate the frictional forces. That being said this is not universally applicable and in future problems care should be taken to make sure it is set up correctly based on the direction of motion of the desired object.
The plot for the excitation frequency has a notable remark as there is a change in the plot at the solved for frequency of the problem in part (d). Revealing, the significance of the natural frequency of the system.
For this problem it helps if you take the moment about the contact point to get rid of the friction term and also remember to use the parallel axis theorem for calculating I
For this problem, solving using the moment about O will also work as long as you also sum forces in the x direction to eliminate the friction force.
In class, we have been told that the Euler equation only works when taken at fixed points. In this problem, it is possible, although harder, to take the moment instead around the center of mass, O. This is not a fixed point of rotation of course, but why does it still work? Is it just a convenient situation?
In class, we have discussed THREE possibilities, in general, for the reference point in Euler's equation: 1) the center of mass; 2) a non-accelerating point; and, 3) a point whose acceleration vector points in the direction of the center of mass.
For this problem, you have options 1) and 3) possible: the center of mass O, and point C (note that the acceleration of point C points toward the center of mass O).
Let me know if this is not clear.
Similar to the example done in class, taking the moment about the where the disk touches the ground will allow you to avoid friction.
This problem is very similar to problem 6.C.4 that was done in class. After drawing FBDs, take the moment about the no-slip point to negate the friction force acting there. Make sure to then use the parallel axis theorem when find the moment of inertia. Use kinematics to relate x values and theta values to find the EOM.