| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
Discussion
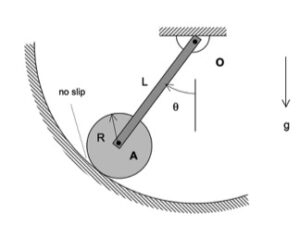
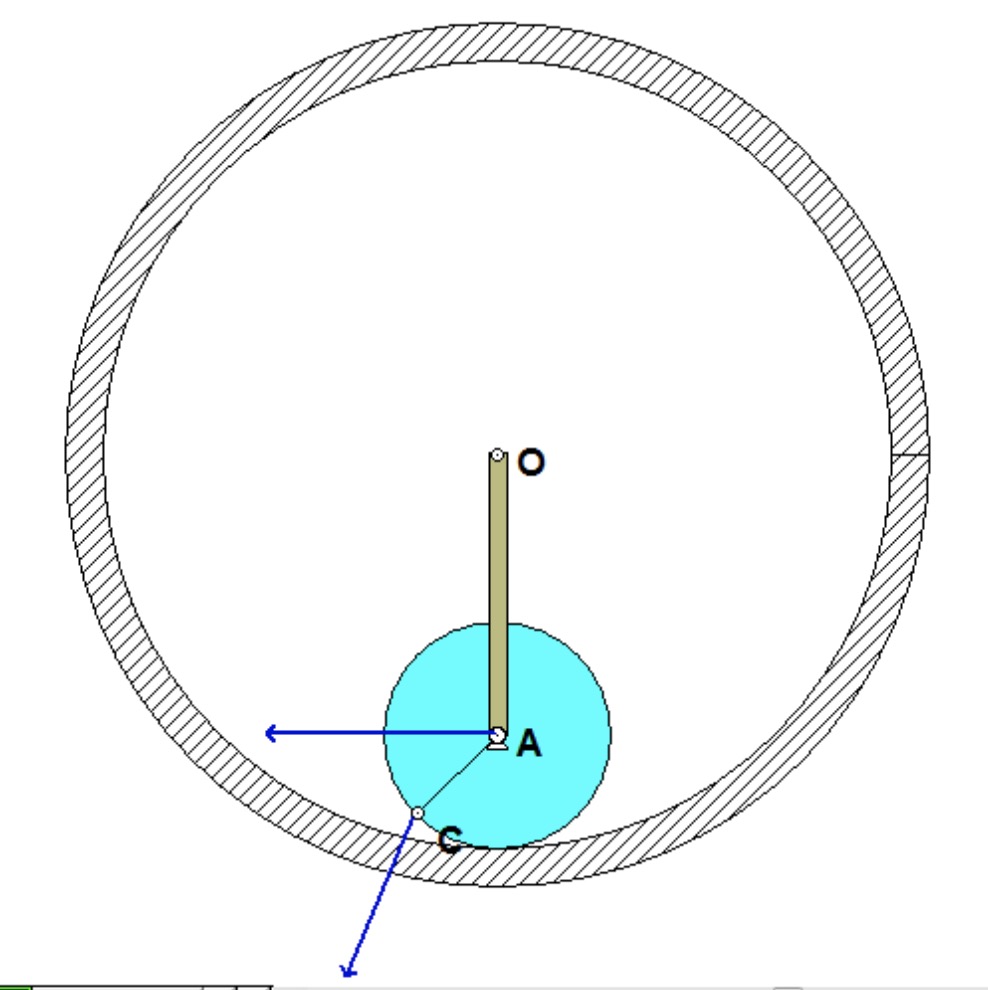
The animation shown above demonstrates the kinematics of the motion of the bar/disk system. The bar rotates about end O. The disk is pinned to end A of the bar, and rolls without slipping on the fixed circular surface. Since the disk rolls without slipping, when point C on the outer circumference of the disk is in contact with fixed ground, the velocity of C is zero. You can readily see this in the animation above.
The instant center (IC) for the disk is the contact point of the disk with the fixed surface. Note the relative sizes of the speeds of A and C in comparison to their distances from the IC. When are the speeds the same? At what positions is the speed of C twice that of the speed of A?
You are asked to determine the rotation rate of the bar when the bar reaches the vertical position shown below.
HINT: As always, we should follow the four-step plan for solving this problem.
STEP 1: FBD. We will be using the work/energy equation to determine this angular speed. Based on earlier recommendations, we will make the choice of our system BIG, including the bar, and disk together.
STEP 2: Kinetics (here, work/energy). The total kinetic energy of the system shown in your FBD above is that of the bar + that of the disk. For the bar, it is recommended that you choose the fixed point O as your reference point for the KE. For the disk, it is recommended that you choose the center of mass A. Be sure to identify the datum line for the gravitational potential energy, and use this in writing down this potential.
STEP 3: Kinematics. You need to relate the speed of A to the angular speeds of the bar and of the disk.
STEP 4: Solve
Can this problem be solved with similar steps/equations as used in example 5.B.7, with the difference being that the angular velocity of this disk is not zero? Also, how does the normal force of the circular surface affect solving this problem? Is it's purpose to provide a contact point C between the disk and circular surface, for use in kinematics when relating Va and Vc to the angular velocity of the disk?
Yes, there is a similarity in the solution process between these two problems. For Step 3 - Kinematics for this problem, you need to enforce that the contact point of the disk with the fixed inner surface has zero velocity (that is, that point is the IC for the disk). Otherwise, the solutions are the same.
An important thing to note for this question is being able to make 2 equations to relate Va to w_disk and w_bar. This helps you simplify the work energy equation to have only w_bar to solve for.
I found it helpful to use the kinematics equation and to relate Va and Vo. As well as relate Va and Vc. to convert to Wbar as you said.
For relating the velocity of A to w_bar, use the fact that v_O is 0 because O is fixed to find that V_A=L*w_bar. Having both w_bar and w_disk related to v_a makes it so that the work energy equation only has one angular velocity term in it.
For the kinematics portion (relating the speed of A to the angular speeds), I found it helpful to consider the FBD of the disk alone as well (similar to example 5.B.7).
For this question, it can be helpful to use the mass moment of inertia at point O. Since this point is not the center of mass of the bar, remember to use the parallel axis theorem to accurately denote Io by accounting for the distance of the bar's center of mass from point O.
How do I relate w_disk to V_A using rigid body velocity equations? Do I need to consider point C in the velocity equation (C being the contact point between the disk and the circular surface)
Yes, use point C.
When doing this, how should we denote r_c/a? I recognize the radius is R, but in terms of i and j directions?
The reason we use point C is to eliminate terms at the no slip point. We know the right side of the equation must include kinetic energy of the bar and wheel. If we choose point C for the kinetic energy of the wheel then its translational velocity term will go away. Keep in mind you will have to use parallel axis theorem with the inertia for the disk when doing this. In terms of kinematics, yes, using point C will be useful for VA because no slip means zero velocity.
For these sorts of questions the typical process is to begin with Work Energy, then move to kinematics and/or kinetics and then solve. Is this process going to be true for most exam questions?
Yes, this is the four-step plan. It is a good plan for both homework and exams.
Because the disk is rolling without slipping, does this mean that friction makes up the nonconservative force? When solving my final equation, I am having trouble relating friction to w_disk or my other known values.
As we have discussed in lecture, the friction force that is required to have rolling without slipping does NO work. This is true because the point on the disk at which the friction force acts is stationary (in order for a force to do work, it must act at a moving point). When using the system defined above (disk+bar), there are no non-conservative forces that do work.
Since the bar is rotating around point O, and point O is fixed, can we remove the translational KE component from the KE equation if we use the moment of inertia around the rod's end rather than the COM? Would the larger moment of inertia compensate for removing the translational KE of the rod?
Yes, I believe this is correct because the velocity of O is zero. Example 5.B.7 shows this, as there is no translational KE in the bar, leading to a larger moment of inertia.
The terms that will appear in the expression for the KE depends on your choice of reference point.
If you choose point O as your reference point, you will have only 0.5*I_O*omega_bar^2 for the KE of the bar. Here, you will want to use the PAT to find I_O = I_G + m*(L/2)^2.
If you choose point G as your reference point, you will have 0.5*m*v_G^2 + 0.5*I_G*omega_bar^2 for the KE of the bar, where G is the center of mass for the bar.
On this problem it is interesting to note that from the perspective of the bar, the disk's center of mass motion is equivalent to a point particle at the end of the rod. In the energy equation you can use the translation velocity of the disk or you can use the point particle approach and use an angular velocity around point O. This is actually generally true for center of mass motion around an axis of rotation.
Do we use the same point for finding the KE and PE of the bar? For example, if using point O, as suggested, there is no change in PE for the bar
The choices for gravitational datum lines and for reference points in the KE expression are totally independent.
I might be misunderstanding what you are saying, but there IS a change in gravitational potential for the bar, regardless of the choice of datum. If you put the datum through point O, then the gravitation potential at position 1 is zero; however, it is then negative for position 2.
thanks
Make sure when writing your potential energy components you account for the different positions the center of mass of the bar and disk end at. Its not the same.
I found it very helpful to set up two kinematic equations for velocity, one for V_a with respect to O, and one for V_a with respect to a contact point C at 0 degrees. This contact point acts as a fixed point, so it has no velocity, and these two equations will give us enough to be able to solve for the angular velocity of the bar. The placement of your datum is also very important for being able to set up your work/ energy equation properly.
When solving for V_A, it is important to remember that V_O and V_C are 0. Making these components equal to 0, allows you to solve for omega of the bar and omega of the disk in terms of V_A, and plug in those values to the work/energy equation to solve for omega of the bar or disk.
If you are ever unsure which equations will be helpful to solve a problem like this, I like to always think about the end goal of what we are solving for, then think of equations that contain that term.
This problem follows a very similar format as example 5.B.7 from the textbook. But in this problem, you have to relate V_A to V_C and V_A to V_O knowing that both V_O and V_C are 0. You then have equations 2 equations (1) V_A in terms of the w_bar, and (2) w_disk in terms of w_bar. So now you are only left with one unknown that is w_bar - which you are solving for.
The problem's kinetics section has a very similar format to problem 5.B.7, which was done on Friday's lecture. Once you set up the work/energy equation, you will have 3 unknowns. Use kinematics, and the knowledge that both Vo and Vc are 0, to find Va and wdisk in terms of wbar.
This problem asks for an angular velocity at a given position, so energy will be the primary tool at play. When adding up the total kinetic energy, I found it useful to add up the kinetic energy from the bar and disks separately. Because they are joined, this allows us to relate velocities to each other, thus eliminating unknowns.