| Problem statement Summary sheet for Newton's laws Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
Discussion
FOUR-STEP PLAN
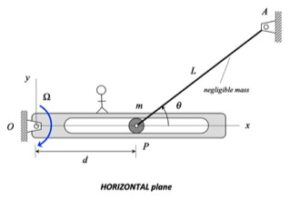
Step 1: FBD - Draw a free body diagram of particle P. Note that the slot is smooth (no friction), and that the system moves in a horizontal plane (no influence of gravity).
Step 2: Newton - Recommended that you use a set of xy-coordinate axes attached to slotted arm. Resolve your forces into xy-components, and write down Newton's 2nd law for P in terms of its xy-components.
Step 3: Kinematics - It is recommended that you use the moving reference frame velocity and acceleration equations for point P, with the observer being attached to the slotted arm:
vP = vO + (vP/O)rel + ω x rP/O
aP = aO + (aP/O)rel + α x rP/O + 2ω x (vP/O)rel + ω x (ω x rP/O)
Along with the rigid body velocity and acceleration equations for link AP, you will be able to solve these equations for the xy-components of the acceleration of P.
Step 4: Solve - Combine your equations from Steps 2 and 3 to solve for the normal force acting on P by the slot and the force on P by link AP.
Can I assume that AP has the same angular speed as the slot arm? If so, can I assume that AP has no angular acceleration?
Those would not be good assumptions.
Recall from Chapter 3 how we solved the kinematics for this type of mechanism. Write a rigid body equation for AP, and an MRF kinematics equation relating the motion of O and P. Together these can be solved for the angular velocity of AP. Repeat for the angular acceleration of AP.
for the MRF equations vp/o rel and ap/o rel we need d dot and d double dot right. How would we go about finding that as we are not given any information about it, or are we supposed to leave it in terms of a varriable?
Please see my comments above to Sylvia. As you follow that process, you will have d_dot and d_ddot as unknowns that are solved in the kinematics step. You might want to review these types of mechanism problems from back in Chapter 3.
Should we have our answers to part B in vector form or their magnitudes?
Scalar is fine.
For this question it is recommended to be in cartesian coordinates, alpha O is zero. Using ridged body for P/A and relative motion for P/O you should be able to solve for all necessary values. Remember mg is also 0 because it moves in horizontal plane.
How many sig figs do we use for g
Since the mechanism is in the horizontal plane, g is acting perpendicular to the system, so there is no impact from Fg.
Hey! I was under the impression that you do not have to account for gravity in the free body diagrams because the particle P is only moving in the slot and is constrained (has only a normal force).
For me, this problem seemed to be a lot of plug and chug and somewhat tedious at points. Use the equations described in the problem's hint, and solve by isolating and setting equal the i_hat and j_hat components for V_p and a_p to solve for the unknowns, plug back in and solve. Then once done, you can plug back into the kinetics equation (Newton) and plug in the accelerations you solved for in the x and y directions to solve for the two-force member's unknown force to get the normal force.
It is important to realize that because the system is moving in a horizontal plane, there is no mg to account for when drawing your free body diagrams. I was initially confused about this.
Building on previous comments, it's very helpful to set up both the moving reference frame equations and the rigid body equations. When initially setting up you equations you'll notice that there many unknowns. Using the kinematic equations and relating them in term of their i and j components really simplifies the question.
I am glad that others are finding this as tedious as I am. I opted to use polar for arm OP and path for AP due to the types of movements they each experience. The equation I found to relate the two equations together that was quite helpful was et (for p/a) = sin (theta) er + cos (theta) etheta. Then basically it is it is like what you said and going and plugging in things to find all the variables to fill out your acceleration formula.