
October 23, 2017
Innovative material for soft sensor could bring new tactile tech
WEST LAFAYETTE, Ind. – A new type of soft and stretchable sensor could find uses in applications ranging from athletics and health monitoring to prosthetics and virtual reality.
The technology, called iSoft, is capable of sensing in real-time, or without delay, and can perform “multimodal” sensing, or sensing a variety of stimuli such as continuous contact and stretching in all directions.
“The novel part of iSoft is that it does not need any wiring or electronics within the material,” said Karthik Ramani, Purdue University’s Donald W. Feddersen Professor of Mechanical Engineering and director of the C Design Lab. “The platform provides the ability to create and customize soft sensors. Even if you have no professional knowledge of electronics you can modify any object with it, including objects with complex shapes.”
Such flexible and wearable sensors are being developed to measure and track body motion, a task made more complex by the human anatomy’s numerous potential contortions. For a wearable sensor to work properly, it must be able to deform accordingly.
Unlike some soft sensors developed previously, iSoft can handle continuous contact and also can be easily modified for custom purposes after manufacture.
“By continuous, we mean moving on the surface and also pressing all the time such as drawing with a pen, which is difficult to achieve,” Ramani said.
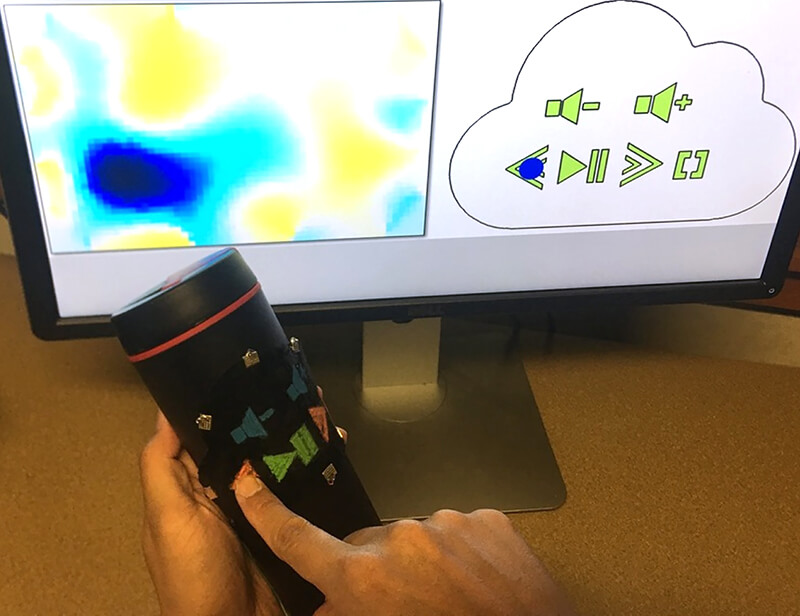 A new type of soft sensor developed at Purdue University can be attached to everyday objects including clothing. (Purdue University image/C Design Lab)
Download image
A new type of soft sensor developed at Purdue University can be attached to everyday objects including clothing. (Purdue University image/C Design Lab)
Download image
The sensor uses a “piezoresistive elastomer,” which when touched changes electrical resistance that provides sensing data.
“We are proposing a low-cost, easy way to fabricate such piezoresistive-elastomer-based soft sensors for instant interactions,” he said.
Research findings are detailed in a paper being presented during the ACM Symposium on User Interface Software and Technology (UIST), Oct. 22-25, in Quebec City, Canada. Purdue doctoral student Sang Ho Yoon will present the paper on Oct. 25. A YouTube video is available at https://www.youtube.com/watch?v=7fNbM-lrX-E.
Wearable technologies such as “smart” garments are an emerging market, as evidenced by recent Levi’s jeans and a jacket that connect with other devices and the Internet.
The iSoft platform is promising for various applications, from artificial skin in robotics to health monitoring, sports medicine and tactile clothing as an interactive interface.
The technology features an electrical impedance tomography - or EIT - technique to estimate changes of resistance distribution on the sensor caused by fingertip contact. The system also uses an algorithm the team developed called a dynamic baseline update for EIT that compensates for “rebound elasticity,” which normally causes a signal delay while the elastomer returns to its original shape. These baseline updates are triggered by fingertip contact and movement detections.
“Further, we support unidirectional stretching sensing using a model-based approach that works separately with continuous contact sensing,” Ramani said. “We also provide a software toolkit for users to design and deploy personalized interfaces with a customized look. This customization toolkit allows users to perform interactions instantly after deployment without any extra training processes.”
The team validated the performance of contact and stretching sensing through a series of experiments and evaluations.
The sensor is a thin, rubbery sheet with electrodes around the periphery. It harnesses a material called carbon-filled silicone rubber, a non-toxic piezoresistive material that has been widely explored in research for various types of low-cost sensors.
“However, the limitations in interactions have been mainly due to a rebound elasticity of the material, which causes a slow-recovery of the sensing signals after material deformations,” Ramani said.
The dynamic baseline update process solves the problem, while the electrical impedance tomography technique makes it possible to fabricate sensors in a “single-volume manner,” or using electrodes only on the periphery of the material, eliminating the need for invasive wires and sensors within the material.
“We have verified the system accuracy and evaluated user performance. More immediately our work will benefit human computer interaction practitioners and novice makers who want to make their own functional soft sensors without in-depth knowledge of material processing or expensive fabrication equipment,” Ramani said. “One can develop many future applications in wearables as well as make objects interactive, or it can be used with existing consumer products as a skin.”
The paper was authored by Ramani; Yoon; doctoral student Ke Huo; postdoctoral research associate Yunbo Zhang; graduate student Guiming Chen; and doctoral students Luis Paredes and Subramanian Chidambaram.
A patent has been filed by the Purdue Research Foundation’s Office of Technology commercialization. The work was partially supported by the National Science Foundation, National Robotics Initiative and an NSF IGERT grant in sustainable electronics.
Writer: Emil Venere, 765-494-3470, venere@purdue.edu
Source: Karthik Ramani, 765-494-5725, ramani@purdue.edu
Note to Journalists: An electronic copy of the research paper is available by contacting Emil Venere, 765-494-4709, venere@purdue.edu. A Youtube video is available at https://www.youtube.com/watch?v=7fNbM-lrX-E. The video was prepared by Jared Pike, communications specialist in Purdue’s School of Mechanical Engineering, jaredpike@purdue.edu.
ABSTRACT
iSoft: A Customizable Soft Sensor with Real-time Continuous Contact and Stretching Sensing
Sang Ho Yoon, Ke Huo, Yunbo Zhang, Guiming Chen, Luis Paredes and Subramanian Chidambaram, and Karthik Ramani Purdue University
1C Design Lab, School of Mechanical Engineering, Purdue University
We present iSoft, a single volume soft sensor capable of sensing real-time continuous contact and unidirectional stretching. We propose a low-cost and an easy way to fabricate such piezoresistive elastomer-based soft sensors for instant interactions. We employ an electrical impedance tomography (EIT) technique to estimate changes of resistance distribution on the sensor caused by fingertip contact. To compensate for the rebound elasticity of the elastomer and achieve real-time continuous contact sensing, we apply a dynamic baseline update for EIT. The baseline updates are triggered by fingertip contact and movement detections. Further, we support unidirectional stretching sensing using a model based approach which works separately with continuous contact sensing. We also provide a software toolkit for users to design and deploy personalized interfaces with customized sensors. Through a series of experiments and evaluations, we validate the performance of contact and stretching sensing. Through example applications, we show the variety of examples enabled by iSoft.
