
May 10, 2016
Pesky squeaks and squeals caused by 3 types of 'stick-slip' behavior
 |
|
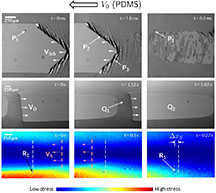
Researchers have uncovered key features of the dynamics of "stick-slip," a form of jerky motion responsible for squeaks and squeals in phenomena from door hinges to shifting tectonic plates. In this series of images, microscopic video frames show that stick-slip arises from propagation of three distinct types of waves - including two newly discovered types - at the interface. (Purdue University School of Industrial Engineering image) |
WEST LAFAYETTE, Ind. – Researchers have uncovered key features of the dynamics of a form of jerky motion responsible for phenomena as diverse as squeaks and squeals in door hinges and automotive brakes, joint wear in the human body and the sudden shifting of tectonic plates leading to earthquakes.
A trio of distinct waves governs the "stick-slip" behaviors that contribute to wear and energy dissipation in structural parts.
"When two soft objects are slid against each other at uniform speed, the interface usually moves by a series of jerky motions," said Purdue University postdoctoral research associate Koushik Viswanathan. "Our new findings show that these jerky motions are caused by a trio of distinct slow moving waves, with direct analogs in nature in the locomotion of worms."
Scientists had already identified one type of stick-slip motion in soft adhesive materials caused by moving waves called Schallamach waves. However, the findings reveal the occurrence of two new stick-slip waves called separation pulses and slip pulses.
The findings were detailed in a research paper posted online April 27 in the journal Soft Matter, published by the Royal Society of Chemistry. The paper was authored by Viswanathan; Purdue industrial engineering professor Srinivasan Chandrasekar; and Narayan K. Sundaram, an assistant professor of civil engineering at the Indian Institute of Science.
The researchers found that when the two bodies are slid Schallamach waves and slip pulses travel in the same direction as the sliding, while separation pulses propagate in the opposite direction, which was an unexpected discovery.
Understanding this behavior is not strictly a matter of fundamental science but is of practical interest for engineers seeking to reduce friction and wear in moving parts.
"Since stick-slip motion contributes to wear, noise and energy dissipation, it's something you want to avoid," Viswanathan said. "Intriguingly, we found that these three wave motions are exactly those used by various insects in nature for locomotion."
For example, whereas a caterpillar moves using Schallamach waves, an earthworm's locomotion is based on separation pulses and a lugworm harnesses slip pulses.
"The observed wave motions were strange because one would expect the waves to all move in the same direction relative to the sliding," Chandrasekar said. "But the insect locomotion analogy provides clarity as to why this occurs. In fact, a similar picture was proposed by physicist and metallurgist Egon Orowan nearly 75 years ago in an entirely different context, namely the origins of how metals deform."
Experiments using a transparent glass cylinder moving against a soft polymeric material allowed the waves and their associated jerky motions to be captured in real-time at high resolution. The researchers used a high-speed camera to take detailed microscopic images of the sliding that helped capture the motions and internal stresses. The jerky motions accompanying the waves were revealed by tracing the motion of the interface. Data recorded with a high frequency force sensor were used to document accurately the jerky signatures of each of the three stick-slip behaviors.
"Our experimental configuration is novel in that it enables all three waves to be produced and observed in the same setup, by varying only two parameters, and is key to uncovering the physics of stick-slip at the micrometer and millimeter length scales," Sundaram said. "Our results strongly suggest that there are only these three modes of stick-slip and no more."
Films showing the behavior are available at https://www.youtube.com/watch?v=XNnYf02CM7c, https://www.youtube.com/watch?v=E83ZGwE3qpw, https://www.youtube.com/watch?v=k8UaalAkNXM, https://www.youtube.com/watch?v=db6J3qM8Hns.
Ongoing work includes efforts to devise a mathematical theory that describes the three stick-slip motions.
This research was supported in part by the U.S. Army Research Office (award W911NF-15-1-0591) and the National Science Foundation (award CMMI 1363524).
Writer: Emil Venere, 765-494-4709, venere@purdue.edu
Sources: Srinivasan Chandrasekar, 765-494-3623, chandy@purdue.edu
Koushik Viswanathan, kviswana@purdue.edu
Narayan K Sundaram, nsundaram@civil.iisc.ernet.in
Note to Journalists: A copy of the research paper is available from Emil Venere at Purdue, 765-494-4709, venere@purdue.edu. The paper’s DOI is 10.1039/C6SM00244G. Films showing the behavior are available at https://www.youtube.com/watch?v=XNnYf02CM7c, https://www.youtube.com/watch?v=E83ZGwE3qpw, https://www.youtube.com/watch?v=k8UaalAkNXM, https://www.youtube.com/watch?v=db6J3qM8Hns
ABSTRACT
Stick-slip at Soft Adhesive Interfaces Mediated by Slow Frictional Waves†
Koushik Viswanathan,*a Narayan K. Sundaramb and Srinivasan Chandrasekara
aCenter for Materials Processing and Tribology, Purdue University
bDepartment of Civil Engineering, Indian Institute of Science
† Electronic supplementary information (ESI) available. See DOI: 10.1039/ c6sm00244g
Stick-slip is a frictional instability that governs diverse phenomena from squealing automobile brakes to earthquakes. At soft adhesive interfaces, this instability has long been attributed to Schallamach waves, which are slow frictional waves. We use a contact configuration capable of isolating single wave events, coupled with high speed in situ imaging, to demonstrate the existence of two new stick-slip modes. It is shown that these modes also correspond to the passage of slow waves - separation pulse and slip pulse - with distinct nucleation and propagation characteristics. The slip pulse, characterized by a sharp stress front, propagates in the same direction as the Schallamach wave. In contrast, the separation pulse, involving local interface detachment and resembling a tensile neck, travels in exactly the opposite direction. A change in the stick-slip mode from the separation to the slip pulse is effected simply by increasing the normal force. Taken together, the three waves constitute all possible stick-slip modes in low-velocity sliding. The detailed observations enable us to present a phase diagram delineating the domains of occurrence of these waves. We suggest a direct analogy between the observed slow frictional waves and well known muscular locomotory waves in soft-bodied organisms. Our work answers basic questions about adhesive mechanisms of frictional instabilities in natural and engineered systems, with broader implications for slow surface.

{kind=link}