| Problem statement Solution video |
DISCUSSION THREAD

Discussion and hints
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
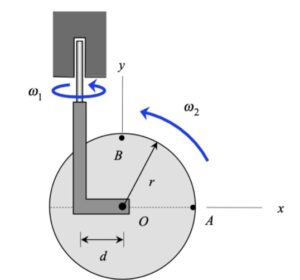
Draw a free body diagram of the system made up of B, bar AB and the spring.
Step 2: Kinetics (angular impulse/momentum and work/energy)
Note that all forces on the system act at the fixed point O. What does this say about the angular momentum of the system about point O? Also, consider the work/energy equation for the system.
Step 3: Kinematics
The kinematics of P are best written in terms of polar coordinates R and φ.
Step 4: Solve
Solve for the R and φ components of velocity of P from these equations.
Any questions?