| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints:
The derivation of the dynamical equation of motion (EOM) for a system is a straight-forward application of what we have learned from Chapter 5 in using the Newton-Euler equations. The goal in deriving the EOM is to end up with a single differential equation in terms of a single dependent variable that describes the motion of the system. Here in this problem, we want our EOM to be in terms of x(t).
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
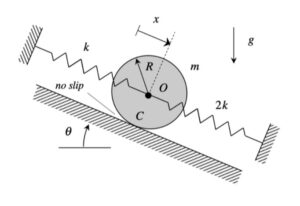
Draw a FBD of the disk. Define a rotation coordinate for the disk.
Step 2: Kinetics (Newton/Euler)
Write down the Newton/Euler equations for the disk.
Step 3: Kinematics
Use the no-slip condition between the disk and the ramp to relate x to the rotational coordinate that you chose above.
Step 4: EOM
Combine your Newton/Euler equations along with your kinematics to arrive at a single differential equation in terms of the dependent variable x.
Any questions?
Is it okay to have the theta of the incline in the EOM equation if force of gravity is defined as mgsin(theta_i) for its contribution to the direction of motion (x-direction as defined in diagram)?
Yes, theta will appear in the EOM.
When deriving the equation of motion, should we treat the rolling disk using separate force and torque equations, or is it better to use an energy method and incorporate the no-slip condition to express everything in terms of x?
You should stick with the Newton-Euler equations in your derivation of the EOM for a system. The work/energy equation will produce a nonlinear first-order equation, which is not what you want.
I think energy methods would create problems since it doesn’t create a clear time dependent EOM (there is no acceleration, only velocity and position)
Once I find the equation of motion, is the static displacement just found by setting acceleration to zero, and then used to shift the coordinate for vibration analysis?
Yes.
After shifting the coordinate to x – xst, is it correct that gravity no longer affects the vibration part of the equation and only changes the static equilibrium position? I wanted to make sure that is why the natural frequency is found only from the homogeneous equation.
Yes, that is a very good observation on your part.
To solve this problem, I summed the moments about the contact point C to eliminate the unknown friction force, using the parallel axis theorem for the disk’s moment of inertia (Ic = 3/2 mR^2) and the kinematic constraint. The resulting equation of motion includes the combined spring force (3kx) and the gravitational component (mgsinθ), which I used to determine the static displacement and shift the coordinate system to z to isolate the natural frequency.
If you sum the moments around the center of the disk it is easier. You only have the friction force of the disk in the moment equation and then you use 1/2mR^2 for I.
Agreed — I solved it this way and the solution is much simpler. Having only one force to deal with in the moment equation allows for simpler substitutions and less algebra to get to the right answer.
What is the purpose of rewriting the system in terms of z=x−x_st? I understand how to do it algebraically, but I’m confused about what it means physically and why it helps with solving the EOM.
There are a couple reasons for doing this:
* If the EOM has a constant forcing term on its RHS, converting the EOM from “x” to “z” changes the EOM to a homogeneous differential equation. These are easier to solve than inhomogeneous equations.
* The coordinate z has a physical interpretation. Free vibrations occur as oscillations about the static equilibrium state. The coordinate z directly describes these oscillations.
It removes the constant from the equation so you just have ax”+bx’+cx=0, instead of ax”+bx’+cx=constant. In this case the constant is the mgsin(theta)
In this question, gravity causes the static equilibrium point to be lower down compared to the unstretched spring position x = 0. This means that the system will oscillate around x_st instead of x = 0. Substituting z = x – x_st accounts for this translation of the equilibrium point and makes the resulting differential equation easier to solve.
Since moving down the ramp forces a clockwise rotation, how does that negative relationship between x_ddot and the CCW-positive rotational acceleration impact the sign of the friction force in my Newton-Euler equations? I’m unsure if I should define friction based on the direction of rotation or the direction of translation to keep the signs consistent.
It is my recommendation to not spend any time thinking about the direction of friction when drawing the FBD of the disk. Over half of a period of oscillation the friction force will point up the incline, and over the other half it will point down the incline.
Simply choose a direction for friction. Since it is no-slip contact with the ramp, friction is simply a force of reaction. Math in the end will tell you whether it points up or down the incline for a specific instant in time.
Will it always be the case where when we have a no slip condition that the direction of the friction can be neglected until we solve for it?
You will not be asked to deal with a problem of rolling with slipping. This is actually a very challenging problem to set up and solve in vibrations.
All of your problems will be rolling without slipping. In that case you do not need to know the direction of the friction force when you draw the FBDs. Just be sure to abide by Newton’s second law when dealing with multiple contacting bodies.
When shifting to the z = x – x_st coordinate, I noticed that the gravity term is perfectly cancelled out by the static spring force. Does this imply that for any linear system, the natural frequency is independent of constant external forces like gravity, and only depends on the mass and stiffness properties
Excellent statement! Thank you for sharing that here. I hope that others tale time to read this.
The springs are attached to the center O. Even though they are on opposite sides, why do we treat their stiffnesses as (k + 2k) in the restorative force term rather than subtracting them?
Keep it simple. Draw your FBD with directions of spring forces abiding by the sign conventions established. Write down your Newton/Euler equations. The signs on the spring forces will follow directly from your FBD. No tricks needed.
Adding on to professor’s point. To draw the FBD, the spring (k) is being stretched, it wants to contract (to return to its unstretched position), so it is pulling the disk back up the incline. The spring (2k) is being compressed, it wants to stretch (to return to its unstretched position), so it also pushed the disk back up the incline. This will set up your FBD arrows correctly and as professor said, the signs on the spring forces will follow from there. I find it helpful to imagine a physical spring in my hand and if I were to let it go, how it would move.
This setup is explained really well in the textbook for chapter 6 too!
I initially thought this as well, but when the block moves, one spring is pulled and one is compressed. Both of the springs forces will be in the same direction regardless of what side they are on.
How do we know the sign of what x is in terms of theta?
Based on how Vo is in terms of its i components, you can tell if it the disc is rolling alongside the positive x or not. Since this is a no slip zone, it should be relatively simple. Once you do this, you can integrate on both sides and you’ll be able to tell that x= (positive or negative) R x theta.
The sign will depend on your choice of coordinate for the rotation of the disk (let’s call it phi). If you define phi to be positive CW, then x = R*phi. If you define phi to be positive CCW, the x = -R*phi.
The sign of x and the sign of theta should line up as long as you define your x+ in the same direction as the translation for the pre-defined positive theta direction
For the EOM in this problem, I found it helpful to be careful with the spring terms. Even though the two springs (k and 2k) are on opposite sides of the center O, they both act to oppose the displacement x, so their stiffnesses effectively add up to 3k in the restorative force term. Also, remember that when you shift to the z = x – xst coordinate, the mg*sin(theta) term should drop out of your final homogeneous equation, leaving you with just the mass and stiffness terms to find the natural frequency.
One thing that helped me with this problem was double checking the no slip kinematics at point C. Since the disk rolls without slipping, it can be related with the centers displacement with x = R theta and this relationship also applies to acceleration which is how you get the moment of inertia which helps lead to the solution.
Generally speaking, are we allowed to leave the EOM in a non-homogenous form? I understand in this assignment the transformations of X -> Z leads to a homogenous form quite nicely.
To simplify this problem, I summed the moments about the instantaneous center of rotation at C. Doing so eliminated the unknown friction force and made the parallel axis thm equation much easier to solve.
I was also able to solve the problem using the Euler equation at O and canceling out the friction force using the Newton equation.
I would draw the FBD first and include each spring force separately. When summing forces for the N/E equations, these spring forces will be summed together anyways so it’s basically like substituting them for one.
what helped me to solev this was to treat the two springs like one equivalent restoring effect and then using the no-slip condition for the disk’s rotation
What equations do we want to use to calculate the natural frequency from the EOM?
Put the EOM in standard form. omega_n and zeta come directly from that form of the EOM.
Why does the static equilibrium position ‘disappear’ when we calculate natural frequency on an incline?
Both static equilibrium position and natural frequency depend on mass and spring stiffness, so even though writing the EOM in terms of x_st doesn’t change your natural frequency calculation, that’s because (to the best of my understanding) the EOM already depends on those system characteristics.
The static equilibrium position ‘disappears’ in any equation used to simplify the EOM. Ex. 6.B.7 in the lecture notes has a spring-dampener system with no incline and the x_st term still ‘disappears.’ The purpose of rewriting the equation like this is to allow for the standardized version of the EOM, ax**+bx*+cx = 0 instead of ax** + bx* + cx = constant (or mx** + cx* + kx = constant for spring-dampener systems)
Since both springs are on opposite sides of the center and assuming a positive x down the incline, should both spring forces point up the incline? Or do they point in opposite directions because one compresses while one extends?
Both the spring forces should point up the incline. The same displacement that stretches spring k ends up compressing spring 2k so both will act as restoring forces pushing/pulling the disk back up.
A compressed spring pushes into the object while an stretched spring pulls the object. Because of this, the two springs forces end up pointing in the same direction.
Both spring forces should point up the incline. You are correct in saying that one spring compresses while one extends, but because the springs are on opposite sides of the disk, the force of the compressed spring and the extended spring are both in the same direction.
Is there anything that we can assume, or a formula we can use to make dealing with xst, or the static displacement, easier? Or a way to cancel it out in our equations?
xst can be found by making x” = x’ = 0 and then substituting x for xst in your standard equation. From there, xst only needs to be made alone on its side of the equation. When rewriting the EOM in terms of z = x – xst, you will find that if your xst is correct, the constant on the right side of the EOM will become 0.
There are two steps needed in dealing with static deformations.
(1) Determine the static deformation by setting the time derivatives of the dependent variable = 0 and solving the resulting algebraic equation for the static response.
(2) Change the coordinate of the problem (say “x”) to the coordinate “z”: z = x – x_st. This change effectively drops constant forcing terms (such as weight) from the RHS of the EOM.
After getting the motion eq, is the change in position obtained by xdotdot = 0? Then just shift coords.
yes. This is the point where all other forces/torques balance out. you should define z = x – xst, and then constant forces should drop out, ie. gravity.
How do I know what terms to cancel out when you shift and take out the natural frequency? Also I am kind of confused to find the eq position from the EOM?
I’m pretty sure you can find x_st just by setting the acceleration and velocity terms (x_doubledot and x_dot) to zero in your Step 4 EOM. Since x=0 is the unstretched position, solving for x there gives you the static displacement. For example, once you switch to the z = x – x_st coordinate, the mgsin(theta) and static spring forces should cancel out perfectly, leaving you with a homogeneous equation for the natural frequency.
Do I need to include rotational inertia in the EOM even though the equation is written in terms of x?
In order to derive the EOM for this problem, you will need to use both the Newton and Euler equations. The Euler equation will bring in the mass moment of inertia into the problem. It is not really a question as to whether to “include” that term – it just naturally occurs.
When solving this problem and while looking back now, I noticed that although the springs are on opposite sides of the block, they both oppose the motion in any direction. Originally I took this as a sign that my answer was wrong, but now I find it important to remember that springs resist any motion outside of their equilibrium, not just stretching.