| Problem statement Solution video |
DISCUSSION THREAD
NOTE: Please note that you are not asked to solve Part (d) of this problem.
Ask your questions here. Or, answer questions of others here. Either way, you can learn.
DISCUSSION and HINTS
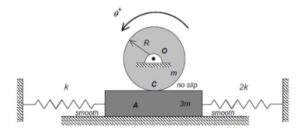
As the system moves, there is no slipping between the contact point C on the drum and block A. This represents a constraint between the drum rotation and the block translation. We will deal with this in Step 3 of the derivation of the equation of motion below.
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
Draw individual free body diagrams (FBDs) of the drum and the disk. Be sure to include the equal-and-opposite contact forces on both the drum and the block. It is important to temporarily define a coordinate that describes the motion of the block. Let’s call that variable “x“, and define it to be positive to the right. With this definition, the spring forces on the left and right side of the block are kx and 2kx, respectively, with both forces pointing to the left.
Step 2: Kinetics (Newton/Euler)
Using your FBDs from above, write down the Euler equation for the drum, and the Newton equation for the block. Combine these two equations through the elimination of the drum-to-block contact force.
Step 3: Kinematics
You need to relate the angular acceleration of the drum to the acceleration of the block. How is this done? What are the results? Also, how do you relate the stretch/compression x in the two springs in terms of θ?
Step 4: EOM
From your equations in Steps 2 and 3, derive the equation of motion (EOM) of the system in terms of θ.
Once you have determined the EOM for the system, identify the natural frequency from the EOM. Also from the EOM, we know that the general form of the response is: θ(t) = C*cos(ωnt)+ S*sin(ωnt). How do you find the response coefficients C and S?
Just to clarify for defining the x at the start if we assume x is to the right does that mean we assume the block moves right so thats how we know the states of the springs for the FBD and if we assumed x is to the left the signs would be opposite in the EOM compared to the x is right assumption?
Yeah, whether we choose x to the right or the left, we are just choosing our reference direction. So even if the signs are flipped, the EOM will still be the same regardless.
Defining x to the right establishes the “positive” direction for displacement and spring deformation, and while assuming x to the left would flip the signs of individual terms in your free body diagram, the final equation of motion remains the same because the restorative forces always oppose whichever direction you define as positive
I believe the direction of definition for x doesn’t matter as long as you have your forces represented in a way that’s consistent with your definition of x. If you end up with a negative value, that’s just telling you the mass moves the direction opposite to what you’ve defined.
The block does not have to move right. If it moves left, the signs will just flip for anything corresponding to the x-direction.
It may be useful to designate x as positive to the right of the equilibrium position because that means that x is positive when theta is positive as designated in the problem statement.
Can we treat the total distance the block can move to be constant? I’m wondering if a good process for this would be like we did for the lecture example with the pulleys and relating the displacement to a constant.
The reason we do that with cables is to relate how the length from one section moves to another. Here the wheel rolls without slipping; so the velocity of the block can be related to the angular velocity and radius without that. The velocity is more complicated with oscillations, so its probably better to keep it for cables instead of developing psuedo-velocity relationships.
In part b, when relating the rotation of the drum (theta) to the displacement of the block (x), I’m assuming the contact point C is a no-slip condition. Since the drum is pinned at O and contacting the block at R, does this imply that the block’s acceleration is strictly X (double dot)= R* Theta (Double dot)? If the block were thick or the contact point was different, how would that geometric offset change the EOM?
This equation depends on what your choice is for the sign convention of “x”.
* If x is defined to be positive to the right, then x_ddot = R*theta_ddot.
* If x is define to be positive to the left, then x_ddot = -R*theta_ddot.
The thickness of the block does not come into play on the kinematics of the problem. All points on the block move together.
Since the drum is pinned at its center, would using an energy method for part b be a better approach than summing forces and moments separately? I’m wondering if treating the block’s translation and the drum’s rotation through the no-slip constraint first, and then writing the total kinetic and potential energy in terms of one coordinate, might make the EOM easier to derive.
Note that the EOMs for our systems are linear, second-order differential equations. If you use the work/energy equation, your equation will be first-order and nonlinear.
To solve this problem, I used the kinematic relationship of x=R.theta to link the block’s translation to the drum’s rotation, then sum moments about the fixed point O for the rotational inertia of the drum and the linear inertia of the block. I then combined the kinetic energy of both masses with the potential energy stored in the parallel springs (k + 2k = 3k), from which I derived a single differential equation of motion to find the natural frequency.
I do not see how you could use the work/energy equation in deriving the EOM for this system.
I’m a bit confused as to how we incorporate the C and S constants in solving for natural frequency. Isn’t the natural frequency just square root of K/M? We can solve for K and M using the EOM in part b. Does this not apply when there is an initial angular velocity?
natural frequency should just be sqrt(K/M) where K = the constant before x, and M = the constant before x”
I understand that the no-slip condition gives x=Rtheta, but I’m confused about the sign and direction. How do we know whether it should be x=Rtheta or x=−Rtheta? Does it depend on how we define positive rotation and translation, and how do we stay consistent when applying this in the EOM?
Please see the response to Alyssa’s question above in regard to the sign on the kinematics term. (I will repeat that response below):
This equation depends on what your choice is for the sign convention of “x”. For this problem and the sign convention for theta that is given:
* If x is defined to be positive to the right, then x_ddot = R*theta_ddot.
* If x is defined to be positive to the left, then x_ddot = -R*theta_ddot.
I think if you define your positive x direction in the same direction that the mass would move when moving in the positively defined theta direction, your signs will both be positive . If you define it the opposite way, then you’d have to plug in negative theta, so it would still cancel out, but it’d just be an extra step
For the friction force acting on the block, I was initially thinking it would point to the left because the block is moving to the right and friction should always oppose direction of motion. However, when I sum forces in x for the block, I get that all of my forces point to the left while the acceleration of the block is to the right. I was thinking friction would then have to point to the right to account for the movement, but this goes against the impending motion principle. Am I approaching this correctly?
So long as the friction force is pointing the opposite way on the block as on the drum it should work. Isolating when the block is on the right, the friction force would point one way as it moves right, and then the other way as it moves left. However, during this timeframe, the spring is always compressed until it passes the centerline. The signs will be accounted for in the math since they are opposite. This is all a result of the friction force depending on the movement of the block while the spring force is dependent on the displacement.
There are two answers to your question (which is a good question):
* The direction of the friction force depends on many things such as stretch/compression of springs, extension/retraction of dashpots, applied forces/torques and inertial effect. In short, it is difficult to determine a priori the direction of the friction force. Over half of a cycle of the subsequent oscillations, the friction will point to the left, and over the other half of the cycle it will point to the right.
* (the more encouraging answer) It does not matter in which direction that you draw the friction force on the disk, only that you follow Newton’s 2nd law in drawing the friction force on the block: have them pointing in opposite directions. As a point without slipping, friction is just a regular force of reaction. The mathematics in the end will tell you which direction in which the friction force acts.
I also set all of my forces acting on my block pointing towards the left. I picked my direction for the friction force by starting with the drum FBD and asking the question “what direction must this force act in order to cause the drum to rotate ccw?” Then I set the direction of friction pointing in the opposite direction.
This works because the direction of your friction forces on the block and the drum MUST be opposed, but their direction doesn’t matter in getting the correct EOM. I tried reversing the direction of the friction forces, and they cancel out to reach the same EOM.
I ran into the same issue when solving the problem. I remembered writing something in my notes referring to the friction force during the no slip, so I referenced that on page 328 there are some good points about this topic. The friction at contact point C is actually the driving force for the block, but because it’s an internal force to the drum/block system, the work done on the drum and the work done on the block cancel each other out in the total energy equation. This helped me work through the problem and adds some depth into understanding the concepts.
No matter which way you chose the friction force to be, you will get the same answer for the EOM, as long as the friction force on the drum FBD is in the opposite direction as the block. The equations for summation of forces in x and moment about O will work out, just with opposite signs for friction.
I’m working through the dynamics of the drum-block system and am getting stuck on the force coupling at the contact point; should the reaction force Fc be treated as purely horizontal, or does the ‘no-slip’ condition mean there’s a tangential component that affects the drum’s torque calculation?
I would focus on the contact force that is tangent to the contact surface between the disk and the block. The connection between the disk and the block is like a gear-to-rack connection: the gear interacts with the rack in the horizontal direction. If you want to put a vertical component to the contact surface in your FBDs, that would be OK, also.
The reaction force Fc can be treated like a friction force, and is purely horizontal and tangential to the drum. The “no-slip” condition means we can easily translate angular motion to linear motion using x = Rθ. We can disregard the normal components acting between the block and drum.
Why does the CCW rotation make my spring forces and inertia feel like they’re fighting in the wrong direction?
It feels backward because CCW drum rotation makes the block move in the opposite x direction through the no slip contact point. So the spring force and inertia are just resisting the motion, not acting wrong.
the springs resist inertia at first, until the angular speed reaches zero, and the block begins to move backwards, at which point the springs support inertia. When they reach equilibrium again they begin to resist inertia.
Spring forces depend on position of the block. Therefore, you need to define a coordinate that describes the position of the block. Let’s say that is a coordinate x that is positive to the right. Then when x is position, the spring on the left side is stretched and the spring on the right side is compressed. Each of these spring forces will point to the left.
With x being positive to the right and theta being positive CCW, then the kinematics in Step 3 will be x = R*theta and x_ddot = R*theta_ddot.
When the drum is pinned at its center, would there be a normal force between the drum and the block included in the FBD? Is this necessary for the no-slip condition?
As described above in a different discussion thread, think of this as being a problem of a gear meshing with a rack. In this case the “friction” force between the disk and the block is actually a gear contact force. The normal force is not relevant in that case. If you want to draw in a normal force, that would be OK too.
Since the drum is pinned at its center, the pin prevents translation of the drum’s center, but it does not replace the contact force between the drum and the block. So I would say there should be a normal force.
Theres no normal force, just reaction forces
There are normal forces in the FBD, however they are not used in the calculations because all the calculations are in the x direction
I was unsure as to whether the natural frequency would be just the coefficient of theta over the coefficient of theta double dot?
Technically it is but it won’t always be the case, especially if the EOM = a non zero function
The natural frequency is the SQUARE ROOT of the ratio of the coefficient in front of theta divided by the coefficient in front of theta_ddot.
for the frequency equation can we sub in theta for x? because the R would cancel right?
Yes, but frequency is sqrt(k/m)/2pi, which doesnt need R
I found it helpful to use the no-slip condition at point C to set x = Rtheta. When you derive the EOM, just make sure to account for both the 3m mass of the block and the moment of inertia of the drum (0.5m*R^2) in your ‘effective’ mass term. If your natural frequency calculation in part (c) feels off, it’s usually a sign-convention error in that substitution.
I found it really helpful to simplify the springs from the get go. Since they both oppose the blocks motion I treated them as a single equivalent spring with keq=3k. Also using x =Rtheta to link the blocks translation to the drums rotation is very useful for getting the EOM.
Please avoid dealing with equivalent springs in setting up your EOM. Simply draw your FBDs abiding by the sign conventions of the problem and follow those sign conventions throughout.
I don’t quite understand how you should identify the positive or negative directions associated with different forces, and their directions. In this case, we defined x to positive right, is this just an arbitrary direction that needs to be followed in later parts of the problem, ie the spring force direction? Is it just defined such that as x increases the spring forces grow negative?
Yes, it’s arbitrary. Just make sure that everything else follows the same direction to stay consistent. With your question about the spring, the -kx results in the spring force acting opposite to the displacement as x increases like you said.
Yes, the sign conventions defined in the problem need to be carefully followed in setting up the EOM.
The problem statement says that x should be defined as positive to the right. When setting up these EOM problems, how does the initial direction definition ease or complicate the overall solution process?
It just makes the signs easier to keep track of. If the motion goes the other way, your answer will just be negative.
Having x being defined as being positive to the right provides us with only the sign convention to be used. This is used in drawing the forces in the FBD, in writing down the Newton/Euler equations and in the kinematics. That says nothing about the initial conditions.
Why do the reaction forces Ox and Oy jsut drop out of the problem?
If you choose to do the Euler Equation taking moments about point O, the reaction forces will not be included as they do not contribute to a moment about O. Because they do not show up in this Euler equation and you don’t need the Newton equations of the drum (just the Newton equations of the block), the Ox and Oy forces are not needed to solve this problem.
If the drum rotates in the positive theta direction, does the contact frictional force at point C create a moment about O that opposes this rotation or supports it?
the friction can be defined in either direction (L/R), it just has to be the opposite direction of the same magnitude friction force in your block fbd.
either way, it appears in the euler moment equation as +/- fR, matching the sign convention for theta, which is already defined as + CCW
When solving this problem it is important to not include reaction forces Ox and Oy in the EOM when summing moments about the fixed point. Since the distance from line of action of O to center of rotation is zero, zero torque will be produced about this point.
Does the fact that the wheel and the plate are “geared” together affect the free body diagram in any way? What does this tell us about the actual situation if anything?
you can treat it as there is a frictional force there.
note: it will oppose the motion you choose your disk to move
I drew separate FBDs for the drum and the block. They both exert equal and opposite friction forces on each other and including those in the N/E equations is important in writing the EOM.
A convenient way to approach this problem is to write everything in terms of one coordinate, theta and then using the no-slip relation to connect the block motion to the drum rotation, this allowed the EOM to come out cleaner
Because the wheels’ friction is pushing the block to the right, is that the direction we should set the positive x direction?
Yes, since positively increasing theta corresponds to the block moving to the right, it’s convenient to set positive x in that direction. However, you could set x to be positive in the other direction if you set up your kinetics and kinematics correctly since the problem wants the EOM in terms of theta, not x.
No. Just choose the sign convention for your coordinate. It’s arbitrary.
Can we assume the system is not in a horizontal plane? That is, does gravity act on all the objects with mass within the system?
Gravity is not relevant, as you only sum forces in X for the Newton/Euler equations.
The problem statement says that the block moves in the horizontal plane.
Does it matter which way we draw the internal friction force on the drum when drawing the FBDs? As long as it is opposite to the block?
It does not matter, as this force is substituted out in the solving process. As long as the directions are acting in opposite directions for the FBD of the block and disk, the math should work out
Yes, the direction of the friction force does not matter as long as it is equal and opposite between the drum and block. This is because in the equations for summation of forces in x and moment about O, the friction force will work itself out to produce the same EOM either way.
Yes. The friction forces at the contact must be drawn equal and opposite on the two separate FBDs, so whatever direction you choose on the drum, the block must have the opposite direction. If you happen to assume the wrong physical direction at first, that is still fine because the equations will return a negative value and tell you the true direction is opposite.
Luckily consistency is key!
Can we assume this problem takes place in a horizontal plane? The problem statement says point O is pinned to the ground, so can we ignore the effects of gravity?
Gravity is still present, but it acts vertically and is balanced by the support reactions, so it doesn’t affect the horizontal motion or vibration EOM at all
I’m pretty sure you’re right about the springs. Even though they’re on opposite sides, if the block moves right (+x), the k spring pulls left and the 2k spring pushes left. So you just end up with a total restorative force of -3k * x dot in Step 2.
Why do both springs create a restoring force in the same direction when the block moves to the right, since one spring is stretching and the other is compressing?
A spring will create a force in the direction of it being restored to the original position. The spring on the right being compressed will want to go back to not being compressed (left) and the spring on the left being extended will want to go back to not being extended(left). The whole system will tend to go back to the original position. So if it is going to the right the springs will act to the left and vice versa.
When the block moves right, the spring of 2k stiffness is compressed and wants to push the block to the left. At the same time, the spring of k stiffness is stretched and wants to pull the block to the left. In this instance, even though the springs are on opposite sides and one is compressed while the other is stretched, they both cause forces in the same direction (to the left). The same is true for the reverse if the block was moving to the left. Hope this helps!
The springs enact equal and opposite reactions on the block when getting compressed or stretched. When stretched, the spring has force pulling to the right. Thus, the restoring force on the block must be to the left (opposite). Now, for the compressed spring it has forces pushing it in to the right. Thus, the restoring force is also to the left on the block.
If one spring is extended and the other is compressed but each spring is on the opposite side of the block from the other, their forces will be in the same direction!
Just wondering, when it says the drum is in geared contact with block A, is that just another term for a no slip condition?
Yes, I believe the language is used in this instance as well because the disk rotates but its center does not translate.
A spring will create a force in the direction of it being restored to the original position. The spring on the right being compressed will want to go back to not being compressed (left) and the spring on the left being extended will want to go back to not being extended(left). The whole system will tend to go back to the original position. So if it is going to the right the springs will act to the left and vice versa.
Yeah, it’s just going to be a restoring force.
F total = -kx – 2kx = -3kx
It’s also a no slip condition, so substitute in x = R(theta)
F total = -3kR(theta)
Using the Newton-Euler Method is very effective here because it creates simple equations to relate the forces acting on the block A and the moment about the Drum O. The link between each equation is the friction force, which allows for a nice simplification to the EOM after substitution.
Yes it is very effective, it also helps to reference some of the problems we have done in lecture.
When trying to make the EOM here, how are the spring force supposed to be written in terms of theta, and how do they exactly both contribute towards the torque although they are on opposite sides? I thought it may cancel out.
F total = -kx – 2kx = -3kx
It’s also a no slip condition, so substitute in x = R(theta)
F total = -3kR(theta)
also, the springs push/pull in the same direction at any point in time. that’s why it simplifies to that F total, You should get a CW torque resisting CCW rotation, and vice versa
I’m confused about how to relate the block’s motion to the drum’s rotation using the no-slip condition. How do I express the displacement of block A in terms of θ?
With the no-slip condition between the disk and the block, the common contact point on the disk has the same displacement and velocity as does the block. These are things with which we dealt in Chapter 2.
How come the drum’s rotational inertia contributes to the system dynamics despite the drum having no translation?
If the drum had no rotation, then the rotational mass moment of inertia would not come into play. This drum has rotation; therefore, its mass moment of inertia is part of the problem.
In this problem, I found it very helpful to start by solving for all x derivatives in terms of theta immediately. That gave me a better sense of what was happening in my head and made the process to finding the EOM feel more logical.