| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
| Problem statement Solution video |
DISCUSSION THREAD
Discussion and hints
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Comments are closed.
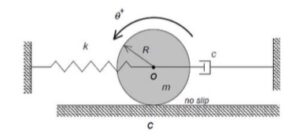
Since the disk rolls without slipping, is it usually easier to derive the equation of motion by writing everything in terms of the translational motion of the center O first and then converting to theta, or is it better to work in pure rotation about the contact point from the start?
While you can definitely use the contact point C as an instantaneous center of rotation, I usually find it safer to derive the EOM about the center O first. It makes it easier to keep track of the individual forces from the springs and the dashpot. Once you have the EOM in terms of x, you can just use the no-slip constraint (x = R*theta) to convert everything to theta at the very end.
I do not see a particular advantage of one approach over the other.
I prefer to work by finding the moment about the disk’s center, and then put the translational acceleration components in terms of theta.
While using the center point O to derive the EOM still arrives at the correct answer, I think that using point C is simpler and a more direct approach given the values that the problem is asking for. When accounting for moments about point C, the force of the spring and the dampener are the only ones in the equation, and I_c * theta double dot is the other side of the equation. Using X = R(theta) and its derivates allows for an easy simplification to get the EOM.
Does the dashpot always act in the same direction as the spring?
I believe that when the disk is at position to the far left or far right in this problem and is moving back to the center, there will be instances where the spring force and dashpot forces are in opposite directions.
I think so since they’re both connected to the wheel
Fdashpot = -vc, forceSpring = -kx; so no, if the wheel is moving foreward but the spring is still compressed they are opposite\
I think they act in the same directions for this problem but in general the dashpot acts opposite to the direction of motion. I think it is really important to draw the FBDs correctly with these kinds of problems.
Please avoid using rules of thumb in setting up your EOM. Just draw the FBDs abiding by the sign conventions of the problem and stick with the sign conventions throughout.
If you think about the spring acting toward the object when it is compressed and away from the object whenever it is extended the dashpot will act the same
Since the spring and dashpot are both attached to the center O rather than the top of the disk, how would the natural frequency change if they were moved to the very top, and since there’s no slip, does that mean the friction force is doing work to dissipate energy?
The friction force in this case is acting only at a no-slip point. If no slip, then no work.
In the equation of motion, should the spring force and dashpot force both be written using the horizontal displacement of the center O, even though the disk is rotating?
Yes, even though the disk is rotating, you must use the horizontal displacement of the center for the spring and dashpot terms because that’s exactly how far those components are being stretched or compressed. If you write the spring force as kx and the dashpot as cxdot first, then at the end just swap them out using x = Rtheta it’s a lot easier than trying to visualize the rotation and the translation at the same time. I recommend this approach because it makes the math and concepts easier.
Yes, the forces in the spring and dashpot depend on the motion of point O.
Since the dashpot is just the “c” value, does the direction of movement matter?
The dashpot force will act to oppose the velocity of the body. If you define the x-coordinate for the center of the wheel to be positive to the right, for example, then the dashpot force will act to the left for positive x_dot.
When setting up moment equation about the contact point C, I found it helpful to double-check the sign conventions for the spring and dashpot moments. I had to redo the problem because of signage errors.
When I created my moment equation, I had to make sure with the right hand rule the signs of my terms in the equation. In particular when taking the moment about C because it has instantaneous 0 velocity as the no slip condition, I found kx and cx_dot were both negative terms. Remember if you do it this way to use PAT.
Is anybody able to help explain the logic for determining the direction that friction acts in for no slip problems like this? I believe that assuming that the disk is displaced to the right from spring equilibrium, the disk’s impending motion will be to the left, however I also noticed that the no slip point c will have impending motion to the right in counterclockwise rotation (with the center of mass moving to the left). Would this mean that the friction will act to the left or am I missing something?
For no slip rolling problems like this, assume a positive direction for friction at first, then write Newton’s law equations for both translation and rotation, then apply kinematics, and solve for f. You will get sign of friction from that. You can’t really determine it from intuition alone.
I just visualize how it would act if there was no friction and look at the direction that the contact point would move on the ground, then point the friction opposite to that. in this problem since the disk is rotating ccw, if there was no friction the ground would stay stationary and the contact point with the ground would be moving to the right, so from this you can tell that the friction force is acting to the left.
How does rotational convention dictate the damping and restorative forces in a rolling disk?
To be precise, it is the sign convention on the displacement of the center of the disk that dictates the spring and dashpot forces.
For example, let x represent the displacement of the disk center O that is defined positive to the left. For that, the spring and dashpot forces act to the right. Alternately, let x be defined positive to the right. For that, the spring and dashpot forces act to the left.
When deriving the equation of motion, the moment of inertia about the contact point C is used via the parallel axis theorem. How does the (3/2)mR² effective inertia term arise, and why does the no-slip constraint effectively increase the system’s resistance to motion compared to a purely translating mass?
Like you said, I used the parallel axis theorem, and the extra term is like accounting for translation and rotation. It’s a sort of rotational resistance beyond just translational that an object we typically use, say a block, would have to overcome.
These are great questions.
The (3/2)mR^2 mass moment of inertia arises regardless of whether you use the center of mass or the no-slip point for your moment in Euler’s equation. Try it.
Rolling a disk with no slipping has more inertia than a block of the same mass that is sliding. For rolling, some of the effort goes into overcome the rolling inertia as compared the effort to have the block simply sliding.
Since the spring and dashpot are both attached to the center O, is the displacement for both of them just x = R*theta? There’s no rotation at O, correct?
Yes because point O only translates linearly during rolling, both the spring and dashpot experience a displacement of x = R*theta and do not “feel” the disk’s rotation
Yes, that is correct.
I’m pretty sure the key is that the spring and dashpot are both pinned to the center O, so they only ‘feel’ the disk’s translation. For example, even though the disk is spinning, the displacement of the center is just x = R * theta because of the no-slip condition at the ground. Once you use that for your kinetics in Step 2, the substitution for the EOM is much easier.
On the gradescope submission for HW37 (6.E and 6.F), when assigning pages to questions it wants us to assign 6.C and 6.D. I belive this will need to be corrected
The problem asks for the EOM of the system in terms of theta (the rotational coordinate) even though the disk has horizontal movement. Is this because of the fact that the disk is rolling without slipping?
I believe that it just depends on what the problem asks for. Because of the no slip condition, x and theta are directly related, meaning that you could technically solve for the EOM in terms of either variable.
Is the natural frequency and damping ratio the same regardless of whether you solve the EOM using x or theta? From what I understand, the frequency response of x(t) and theta(t) are scaled apart by the radius in the case of rolling without slipping. Does that mean I can solve for x(t) and just divide by the radius to get the frequency response theta(t)?
Yes, natural frequency and damping ratio are independent of the choice of dependent variable for your EOM. x and theta in this case are proportional.
Is there a rule of thumb for when we should be taking a sum of moments vs a sum of forces in the x, or is it more valuable to do both every time.
I don’t know if there is necessarily a rule of thumb that you can always use, but generally the second equation can be used to help cancel out a force that is present in both equations. In this problem, if you take the moment about O, the friction force will be included in the equation, meaning that you will need to use the sum of forces in the x direction so that you can eliminate the friction force between the two equations. However, if you take the moment about C, the friction force is not present, and you only need the one equation.
If the disk is rolling with positive CCW rotation, should we assume x is positive when moving left?
As long you stick with the same sign convention, you should be fine i think. In this specific question taking the x as positive to the left could simplify some of the negative sign in the equations.
For this problem, I plan to take the moment at O as it will cancel out the spring forces and leave an equation to relate the friction force. Should I instead take the moment from point C where the wheel hits the ground to create a relationship equation between the springs?
Either way works.
* If you take the moment about point C, then you can avoid dealing with friction.
* If you take a moment about O, this will include friction. Because of this you will need to also use the Newton equation for the disk, and then eliminate the friction force between the two equations. You will get the same result, just with a little bit more effort.
When setting up the equations, how do you know whether to take moments about the center O or the contact point C without trying both?
I took the moment about O when I first solved this problem and then realized finding the friction force would take me more thinking. So then I switched over to the contact point C and it made my life a lot easier. For the disk problems so far I think its generally easier to take the moment about contact point C, unless your contact point C is on a moving object like in the past homework.
I tend to choose my moment point based on which point has fewer forces acting directly on it, as this leads to fewer variable in the moment equation and generally makes it easier to solve
I think the main tradeoff is that taking moments about C is often algebraically cleaner because friction and the normal force have zero moment arm about C, so you can avoid solving for friction directly. If you take moments about O instead, friction appears in the moment equation, so you usually also need the force equation in x and then eliminate F. Both methods should give the same EOM if the sign conventions are handled consistently. This matches what CMK said about either approach working, with C often saving a little algebra.
After deriving the EOM the natural frequency and damping ratio can be found. Based on the relatively low value for compared to the stiffness, I would think we should expect and underdamped response. This means the disk will oscillate back and forth past the equilibrium point before eventually settling which seems to be consistent with the initial conditions.
The only flaw that I see in your thinking is that the initial conditions do not determine whether the system is underdamped, they only determine how the underdamped motion starts.
Since the disk rolls without slipping, is it best to derive the EOM using θ only from the start and substitute x_O =−Rθ for the center’s horizontal motion, or should we first write separate translation and rotation equations and then apply the no-slip constraint afterward?
Since the disk is constrained to roll without slipping, the translation of the center is not independent. You should first write the translation equation of the disk center, then write the rotation equation about the center then apply the no-slip constraint and finally eliminate the friction force.
Yes, it’s usually cleanest to use theta as the single coordinate from the start and use x_O = -R theta for the center’s horizontal motion. You can write separate translation and rotation equations first, but you would still apply the no-slip constraint afterward to combine them.
When deriving the equation of motion, do you want us to use Newton’s laws with force and moment equations plus the rolling constraint, or is it okay to use an energy approach to get the same result?
I’ve noticed on past discussion threads for other homeworks a similar question come up. From my understanding, the EOM is a linear differential equation, but if you use the energy method you will have to deal with non-linear equations. Because of this, I think it’s recommended to stick with the Newton/Euler equations.
I’m a little confused on which direction I should draw the dashpot force in. Does it act in the same direction as a spring?
A dashpot’s force always acts opposite to the direction of velocity. This is quite similar to the behavior of springs, which always act opposite to the direction of displacement. But note that the direction of velocity and the direction of displacement of a point can be at odds, so carefully consider the direction of the resulting spring and dashpot forces in consideration of the point’s displacement and velocity. Hope this helps.
If the direction of velocity and direction of displacement are at odds, do we just take the dashpot force to be opposite to the direction of velocity? Or is that too much of a simplification to how these forces act?
I found that solving for the friction force at c was far easier taking moments about C rather than O as C is a fixed point.
Does the definition of theta dot as positive in the counter clockwise direction affect the forces on our FBD? Like in this problem, does theta dot being positive counterclockwise mean that kx force goes to the right?
It depends on how you define “x”.
I found it very helpful with this problem to define the damping and spring force in the same direction, to make it easier to keep track of the sign differences. This type of problem is most difficult when the forces are in different directions
The directions of forces should follow from sign conventions that are define. The directions of the forces themselves should not be defined.
will there ever be a question in this class where we have a vibrations problem in the horizontal plane
Sure.
Does the dashpot force depend on the velocity of the same attachment point as the spring, or just on the center velocity?
Isn’t that one and the same point?
The dashpot is connected to the center of the disk, not the edge. It may look like it is, but the force is acting at point O. Because of this, you will care about the center velocity.
What is the best method of determining the direction of motion? It begins unstretched, but does it matter which way we choose it rolls, or does the math work out no matter what direction is chosen?
As long as you are consistent with your signs, you will end up with the same answer. Personally, I would suggest placing the positive direction in the direction the disk is rolling because I find it more intuitive to understand which way the spring forces will react.
I’m assuming you mean how to choose the positive x direction and sign convention. Any consistent convention will work, but some choices make the no-slip relation easier to write. For example, if you define positive x in the same sense as positive theta, then the rolling constraint can be written as x = R*theta instead of needing a negative sign. The main thing is that once you choose that convention, you have to use it everywhere, especially in the force/moment equations. So if positive x is not to the right, you can’t keep writing the equilibrium equations as if it were. Also, this sign choice is not really “determining” the actual direction of motion ahead of time. It is just a coordinate choice that lets the math tell you the motion through the sign of the result.
Does calculating the response of the system in terms of theta work the same way as when in terms of x?
Solving for theta works the same way as solving for x(t) since both are standard second order differential equations, the process of finding the characteristic equation, roots, and applying initial conditions is are the same.
For part (b), would it be preferred for us to plug in the values for m, c, and k in the EOM or leave them as is?
Based on (b)’s wording, it’s fine to not plug in the values for m, c, and k. They specifically ask for the EOM in terms of theta and its derivatives, and then at most the parameters, m, R, c, and k.
This is what I thought as well, considering it is what is shown in lecture and is what other homework problems have had.
For part (c), once I derive the EOM in terms of θ, should I apply the initial conditions directly as θ(0)=θ_0 and θ˙(0)=θ˙_0, or do I need to first convert them into the center’s linear displacement and velocity using the no-slip relation?
For part c I found it helpful to apply the initial conditions directly in terms of theta θ(0)=θ_0 and θ˙(0)=θ˙_0 since the EOM and response are both written in θ. If I used the no slip relation to convert to linear displacement or velocity if it would be to solve the problem in terms of the centers motion instead.
Your IC’s are in terms of the rotational coordinate in theta, which is the same as the EOM and the general form of the solution. I see no reason to convert the EOM to a different coordinate.
In this problem, I was able to apply θ(0)=θ_0 and θ˙(0)=θ˙_0 in the underdamped free vibration response equation, present on page 390 of the lecturebook, to derive values for the constants C and S, which I then used to fully answer part (c). Hope this helps.
In the EOM, should the damping term and restorative term always have the same sign if they both oppose the displacement and velocity of point O?
To my knowledge, any stable, passive EOM’s terms must have the same signs when put to one side of the equation (the other side being 0). This describes a system with parts that work altogether to bring the system to equilibrium. If there is a conflict in the terms of your EOM, I recommend checking for sign errors or other algebra errors. Hope this helps.
Yes, the damping and restoring terms should have the same sign in the final EOM, but that is because both are modeled as resisting terms relative to the chosen coordinate, not because the spring force and damping force always point in the same physical direction throughout the motion. In practice, displacement and velocity can have different signs at a given instant, so the spring force and damping force can oppose each other physically. The restoring term depends on displacement, like -kx, while the damping term depends on velocity, like -cx_dot. They appear with the same sign in the final EOM because both are written using the same resisting sign convention in the chosen coordinate system.
Since the disk rolls without slipping, I know x = R*theta. When theta is defined as positive counterclockwise, does that mean my x displacement for the center O must be defined as positive to the left to avoid a negative sign in my kinematic constraint?
Yes, that is correct. the relation x = R*theta would not hold true if the positive x direction is defined to point towards the right, and would need a negative sign, because a positive increase in theta would not correspond to a positive increase in x. Of course, it is not wrong to do it via this method, but it is best to put emphasis on simplifying the mathematics for the calculations. Hope this is helpful.
Can the damping term be interpreted as a form of rotational damping? I know that the damping term originally acts linearly but the motion is rotational.
Yes, since the disc is no slip, the rotation and linear velocity act together
If we define theta as positive in the CCW sense, the center must move left. Does this mean that x must be defined as positive to the left as well?
No, you do not need to define x as positive to the left. If you define left as pos x, then x = Rtheta, if its right pos, you can define it as x = -R theta.
Once you derive and find x dot dot, it will be the same.
Yeah, it doesn’t really matter. but, defining it as positive in the CCW, and x = Rtheta, keeps the derivatives positive and just simpler overall.
When solving for the damped angular frequency, the EOM, or for x(t), I find that solutions that easily simplify are most often the correct ones. If I’m encountering a situation where I need several series of equations to solve a problem or variables aren’t stacking up, I often go to recheck my algebra. For this problem, I found example 6.A.2 in the lecture book very helpful, as the set-up and FBD are similar to the homework problem.
I’m stuck deriving the equation of motion. How do I correctly account for rolling without slipping when relating the translation of the center to the rotation θ?
remember the IC is the contact point. that point also has no velocity. the displacement of the center O is directly proportional to the arc length rolled: x = R(theta).
I summed the moments around the contact point for my EOM
Sum(Mc = Ic * a)