| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Discussion and hints

| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Discussion and hints
Comments are closed.
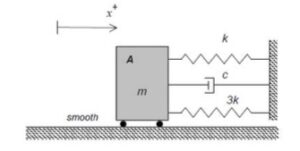
If the two springs were placed on opposite sides of the block instead of both being attached to the same wall, would the equivalent stiffness in the equation of motion still be 4k, or would the setup change the system behavior?
Even if the springs were on opposite sides, they would still be in parallel because they both experience the same displacement x. As the block moves to the right, one spring compresses while the other stretches, and both forces would act in the same direction to oppose that motion. So, the equivalent stiffness would remain 4k (k + 3k).
Keep things simple. Do not concern yourself with “equivalent” stiffnesses. Simply draw the FBDs and have your spring force directions abiding by the sign conventions defined. The math will take care of things.
It’s still 4k. The system behavior does not change (as long as both springs connect the block to fixed walls and are unstretched at x=0).
In part (d), the problem states the system is released when the springs are unstretched, so does this mean that the total force from the springs is zero at t=0? And how does that change the way I’d apply the initial conditions to the general solution of the differential equation?
The initial conditions do not come in to play in deriving the EOM. Just follow the general procedure that we have set up of drawing FBDs based on the sign conventions and follow those throughout. Consider the initial conditions only at the end when solving the EOM.
In general, can 2 springs exerting forces in the same direction be combined into 1 spring with a k = to the sum of the individual k values? Can the same thing be done with dashpots?
Yes, you can combine springs in parallel, as well as dashpots in parallel. As long they experience the same displacement and velocity (conditions to be considered parallel), then you can combine them. This works because the forces from each component are acting in the same direction to oppose the motion, so their effects can become one. Like you said, you would just sum the k values and would do the same with the c values for dashpots. This definitely makes the EOM easier.
Keep it simple. Do not be concerned with equivalent springs. Simply follow our process of deriving the EOM of: FBD using sign conventions; N/E equations using sign conventions; kinematics using sign conventions. That will never lead you astray.
2 springs extorting forces in the same direction can be combined into 1 combined spring constant, and the same with the dash pots. I recommend to still draw it separately because it is easier to check your work while referring to the problem statement! That way if there is some error in your calculation, it is clear that the directions chosen are correct per your assumptions.
For this problem can both springs be combined into 1 just with different k values, or does direction matter?
Yes, because both are spring forces. If one is kx and the other is 3kx, they combine to give a total spring force of 4kx.
Keep your focus on deriving the EOM using FBDs, N/E equations and kinematics. Do not focus on things like equivalent stiffnesses.
Effectively they do make one spring but that could get confusing if the springs were in different orientations. The math all works out in the force summations and it isn’t too much extra work to do it that way
Direction does matter, but in this problem and other examples from the book, the spring forces happen to be in the same direction. The direction is determined by the direction of the restoring force of the spring or dashpot
Since the surface is smooth, does that just mean there is no horizontal friction force included in the FBD of the block?
I assumed that this meant that friction was negligible.
Correct.
is it normal for wd to be extremely close to wn?
It typically is for light damping.
For this equation where zeta (dampening constant) is relatively small, w_d will be close to w_n because the system experiences light dampening. For a zeta value further from 0 and closer to 1, the system experiences more dampening and w_d is not as close to w_n as a lightly damped system.
Why do parallel springs and dampers behave like a single unit in mechanical vibration?
I’m pretty sure it’s because they are constrained to move together. In the problem setup, they have the same displacement and the same velocity at any given instant. Thus, when you set up the equation, their restoring/resisting forces combine algebraically into one equivalent stiffness and damping.
Since the initial condition is x(0) = 0 and ẋ(0) = v₀ (released from rest position with an initial velocity), how does having only an initial velocity — but no initial displacement — affect the form of the underdamped response solution, and what does that imply about the phase angle φ?
I believe the x(0) = 0 condition makes the phase angle/shift = 0 as well, and the initial velocity condition relates to the amplitude of the resulting waveform.
Having zero displacement as an initial condition says that the coefficient in front of the cosine term in the solution is zero (C = 0). In terms of the phase angle, it depends on how you have defined your phase angle.
* If you write the response as a sine function with a phase angle, the phase angle is zero.
* If you write the response as a cosine function with a phase angle, the phase angle is pi/2.
What is the physical meaning of the damped natural frequency? I understand the math, but I’m struggling to understand what it physically represents.
* For undamped response (zeta = 0), the response is purely harmonic and the frequency of oscillations in this free response is omega_n.
* For underdamped response (0 < zeta < 1), the response is a harmonic function with an exponential amplitude modulation. In this case, the frequency of the harmonic portion is omega_d = omega_n*sqrt(1-zeta^2).
The damped natural frequency is the frequency at which a system actually oscillates when there is friction or resistance. In an ideal system with no energy loss, it would oscillate at its natural frequency. But in real systems, damping slows things down and reduces that frequency slightly.
In part d, since x(0) = 0, the spring forces are zero, and the damping force depends on velocity, does this mean that the only thing slowing the block down at the very first instant is the dashpot force c*v_0?
Yes, at the instant t = 0, the dashpot is the only element providing a resistive force because the spring forces are proportional to displacement, which is zero at the start
That is true; however, that observation is not relevant to solving the problem. You need to derive the EOM based on a general state of displacements and velocities. Only once the EOM is derived do you become concerned about the initial conditions. The ICs are imposed on the general form of the free response.
The approach to this question would be first using the FBD to form the EOM and then using the EOM to find the wn, zeta, and wd values easily from that. Since the EOM is underdamped, you can use the standard x(t) equation form, and then you can find the unknown variables using the given initial conditions.
How can I tell from just initially looking at the diagram and given info that this system only has one degree of freedom?
You can tell that the system is only moving left and right based on the fact that it is constrained to the x plane by the roller supports, also the dampening and springs are only in x direction.
I think if there are any other degrees of freedom in the problem they would be explicitly stated or made very obvious (by listing which way gravity is pointing, for example)
The number of degrees of freedom that a system has is dictated by the number of independent variables that are needed to completely describe the configuration of the system. In this case, you need only one variable to describe the position of the block along the horizontal surface. Therefore, it has only one degree of freedom.
For this problem, I have that the springs and dashpot all point to the left on the right side of block in the FBD. Is this the correct way to approach the problem, or would the dashpot be pointing an opposite force direction to the springs as it is dampening motion?
Yes, this should be the correct way to approach the problem. Assuming positive displacement of x and a positive x_dot to the right, the springs should have a force that pushes left since they are compressed. Additionally, the dashpot should point left since damping forces always oppose the velocity.
I think William is right about the cosine term dropping out in Part (d). Since the problem says the system is released while the springs are unstretched, our initial condition is x(0) = 0. When you plug that into the general underdamped response, it forces the C coefficient to be zero, so you’re only left with the sine term to solve for using v_0. It makes the final response equation for x(t) look way cleaner.
Is the function of the dashpot to simplify the damping of the spring only, or does it serve any other purpose of physical representation?
The dashpot is there to represent real energy loss in the system, like friction or fluid resistance, not just to make the math include damping.
When writing the EOM, should I always assume a positive direction first and let the signs work themselves out, or is there a better way to assign directions to spring and damping forces?
I believe it is always best to assume the system is in a state of positive displacement and positive velocity unless told otherwise. This creates consistency where spring and damping forces naturally oppose the coordinate directions. Additionally, if you assumed the opposite direction but stayed consistent with all your signs and FBD’s, the signs should correct themselves in the final EOM regardless of the block’s position or the direction of travel.
If there were friction in this problem would this term be included in the damping constant or would it appear in our differential equation, or both??
I think friction would be a force in the differential equation but not included with the damping constant, because the damping constant relates a force that is velocity dependent, while friction is a normal-force (acceleration) dependent force.
For the final part of the problem, the phrase “released when the springs unstretched” is key because it tells us that x(0) = 0. In the general solution for an underdamped system, this initial condition cancels out the entire cosine part of the equation leaving us with a much simpler sin function for the response. This makes the final math a lot less intimidating to write out.
When writing the damping force for this problem, is it correct to use F_c= -cx dot directly because one end of the dashpot is attached to ground? If a dashpot were connected between two moving bodies instead of a body and ground, would the damping force then depend on relative velocity rather than just x dot.
Yes that is correct, since one end of the dashpot is attached to ground, the damping force is based on the block’s velocity relative to the ground. Also yes, if the dashpot was connected between two moving bodies the damping force would depend on the relative velocity of its two ends.
Yes correct. Since one end of the dashpot is fixed to ground, the damping force is based on the block’s velocity alone, so Fc = -c xdot. If the dashpot were between two moving bodies, then the damping force would depend on their relative velocity, so it would be based on something like c(x1dot – x2dot).
Since both springs are attached directly between the block and the wall, should we treat them as acting in parallel so the equivalent stiffness is k + 3k = 4k when forming the equation of motion?
Yes, we can treat the springs as acting in parallel, meaning that the keq of the system is 4k. This is because the spring will both act on the block with the same behavior.
I find it helpful that after deriving the EOM, divide out so there is a coefficient of 1 on the first term. Trusting the math, the natural frequency can be found using coefficients now instead of worrying about effective mass or spring constants.
If friction was also considered in this problem, how would it change the damping ratio of the equation? What effects would this have on the motion of the block?
The inclusion of friction in this problem makes to problem complicated enough that we cannot either derive or solve the EOM with the tools that we have. That would actually be an advanced problem.
Although it does not make a difference in the problem, does the difference in springs not exert a torque on the block? Since one has a far greater spring constant would that not end up on a clockwise torque on the block?
Yes, I believe this is why we can only solve this problem with the absence of friction.
For part b, does isolating x_doubledot by itself in the equation matter if a question like this appears on the exam?
Not sure of what you are asking here.
Are there any special assumptions or equations we have to make in regards to the damping of the spring or can we just use the equation for x(t) written using Euler’s method that we talked about in class?
You should use the equation for x(t) used in the in-class examples. Deriving the equation for xdot(t) is also the same as in the in-class examples. If you use the equations for x(t) and xdot(t) along with the given initial conditions, the constants C and S can be solved for fully and the full x(t) equation can be found.
what helped for this was to be careful with the signs on the damping and the spring forces when setting up the FBD, otherwise it was a fairly striaghtforward problem after the EOM was set up.
Should the damped frequency equal the natural frequency even though this system is indeed damped? This doesn’t make much sense to me since that’s basically saying the system has no damping if they’re equal.
The damped natural frequency will equal the undamped natural frequency only when zeta = 0. For this damped problem, the damping ratio is not zero; therefore, the two frequencies are not the same.
For the damping ratio, is it the right process to first determine the equivalent stiffness being 4kx because of the way the FBD is draw, and then compute the damping ratio or is it only determined by the stronger spring? Is there a limiting factor on the spring?
Yes, find the equivalent stiffness first the springs act in parallel. You don’t need to use the stronger spring because the damping ratio depends on the whole system. There is no limiting factor for the spring either.
In order to determine the undamped natural frequency and the damping ratio, you must first derive the EOM. Once this EOM is set, these two parameters are identified from the “standard form” of this EOM. There are no other things to remember about the process.
When drawing the FBD, should I show two separate spring forces first and then combine them into one equivalent restoring force afterward?
Yeah, that’s what I did. I showed the separate spring forces and the dashpot damping. The springs add in parallel and the dashpot provides a different, separate force.
Yes, I would suggest drawing the springs separately because in some problems the forces of the springs may be acting in different directions, and drawing them individually may reduce the risk of making simple mistakes.
Yes, that is what I did; it helps denote that there is not one singular spring force. In your FBD, you want to show all the individual forces acting on the body, and then you can combine them through calculation/solving the question.
Yeah, it not only makes the process easier, but it’s also good practice because these are two forces, not one. Also, we will definitely, at some point in a class, see problems where the springs are offset and generate torque, and you might miss that if you draw them as 1 force.
For a system with x(0) = 0 and a nonzero initial velocity, how does this affect the structure of the response solution? In particular, does this condition eliminate the cosine term
Yes, it eliminates the cosine term. In the standard solution x(t) the cos coefficient is determined by the initial position. Since x(0) = 0, the cos coefficient must be zero to satisfy the starting condition, leaving only the sine term to account for the initial velocity.
If the springs had different natural (unstretched) lengths, how would that modify the equation of motion and equilibrium position?
The center point where the block naturally rests at equilibrium would move. Instead of resting at x=0, it would settle at a spot where the two springs’ different natural lengths balance each other out. Even though the resting spot changes, the way the block shakes back and forth remains the same. The stiffness and the damping don’t change, so the math you use to describe the EOM is the same, just the initial condition would change.
I found that my Wd and Wn are very similar. Is this normal for problems like this?
I believe so. The damping constant appears to be very small often, leading the two to be very similar.
omega_d = omega_n*sqrt(1-zeta^2)
For light to moderate damping, sqrt(1-zeta^2) is close in value to 1. Therefore, you would expect the two frequencies to be the similar in size.
How do we assume an initial direction for spring force if it begins unstretched, is it just opposite to the given coordinate system?
In my FBD I drew the spring forces to the left, since the block’s initial velocity is positive and takes it to the right initially compressing the springs
As you work through the problem, you will know if you take the forces in the wrong direction because you will eventually end up with negatives which will lead to complex numbers, which I’ve been told are not used in this course.
I think as long as we use a consistent coordinate system and the spring force opposes the motion in the setup of the problem, the solution should still be correct.
I always find it easiest to assume the initial velocity is in the direction of the +x given in the problem unless otherwise told. If there is no given +x it is easiest to define it in the direction of the initial velocity.
Yeah, I usually try to guess the initial direction of the force with the direction of motion or acceleration. However, as long as you remain consistent with sign conventions and directions, you will get the true direction of the force regardless of the guess. So it is really whatever you can understand the best (and looks more organised), at least in my opinion
Do the variables in the response equation C and S change with time?
No, they are constant with respect to time
No, C and S are constants set by the initial conditions. The time dependence is already contained in the exponential and sinusoidal terms. So once x(0) and x_dot(0) are applied, C and S are fixed numbers for the whole motion.
For part (b), would it be preferred to plug in the numerical values for k, c, and m in our EOM or leave them as they are?
I think it is best to leave it as k, c, and m. On other homework problems I believe we left it in those as well, even when given a k for solving with later.
Yeah, I just left it like that, they mentioned to leave it in those parameters which I interpreted as just leaving them like that
Before writing the response in part (d), do I need to calculate ζ first to decide whether the system is underdamped, critically damped, or overdamped, and then choose the correct form of x(t) from that?
I calculated the damping ratio first to determine if its motion is underdamped, critically damped, or overdamped, and used it for the form of x(t) to use in part d. Once I knew the case, I wrote the general solution and then applied the initial conditions x(0)=0 and x˙(0)=v_o.
Yes. It would be best to calculate the value of the damping ratio first rather than simply making an assumption. If it is less than 1, it is underdamped. If it equals 1, it is critically damped. If it is greater than 1, it is overdamped. There are 3 different equations for each of the three states of the system, so use the correct one. Hope this helps.
Yes, I did that it my work and it made it a lot simpler. Others have already acknowledged this it makes it a lot easier to tell with response equation would be used for d. It also helps applying the initial conditions since you’ll be solving for the right constraints from the start.
Yes, knowledge of the value of ζ is important since the size of ζ as compared to “1” dictates the form of the solution that you need to use.
How does the radius influence the damping ratio? Like, would a larger radius disk mean that the damping ratio in this problem would be larger or smaller
This was meant for Homework H6.F
You should have no expectation of knowing the influence of the radius of the disk on the damping ratio without first deriving the EOM. These relationships make themselves known from the resulting EOM, not from casual inspection before the fact. Having worked problems such as this in the past, I think that you will find that both the natural frequency and the damping ratio will be independent of the radius of the disk.
This problem really shows how important it is to start with your free body diagrams
Does the damping ratio only get determined by the dash pot, or does the string stiffness/setup also influence it?
No I believe it is determined by both the dashpot in relation to m, and the total stiffness of the spring setup
The dashpot is what introduces damping, but the damping ratio is not determined by c alone. Once the EOM is written in standard form, zeta depends on how the damping compares to the inertia and stiffness of the entire system. So in this problem, the spring setup still matters to zeta even though the dashpot is the only actual damping element.
In E we assume springs dont have a mass but if the springs weights were counted would we just add their mass to block A, or do something else ?
No, I don’t think you would add the mass because one end at the wall is stationary, while the end on the block is moving. I am not sure exactly what you would do, maybe add a portion of the spring’s mass?
I think that since one end is fixed, only part of the spring’s mass would contribute to the motion of the block. Maybe around 1/3 of the mass is a pretty reasonable estimate.
I believe you’re right. Since one end is fixed and the velocity varies along the length it wouldn’t make sense to just add the full spring mass to the block mass. A portion of the spring mass should contribute, so using part of the spring mass as effective seems more realistic.
What do the response coefficients C and S actually mean? Are they just constants or do they indicate something else about how the system is moving?
For the free body diagram, should all spring and damping forces be written in terms of x and x dot acting opposite the motion? I’m unsure how to set up the signs correctly.
draw the forces acting in opposition so that when you sum them, they appear as negative values. When you rearrange everything into standard form, the coefficients will stay positivem and give you a system that restores equillibrium.