| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Discussion
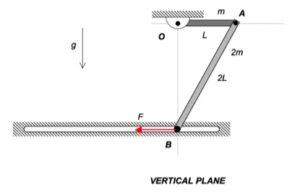
The animation shown above demonstrates the kinematics of the motion of the system made up of bars OA and AB. Bat OA rotates about the fixed point O. Bar AB is attached of OA with a pin at A, and end B is constrained to move along in a smooth, horizontal slot.
You are asked to determine the speed of end B of AB when the bar OA reaches the vertical position shown below.
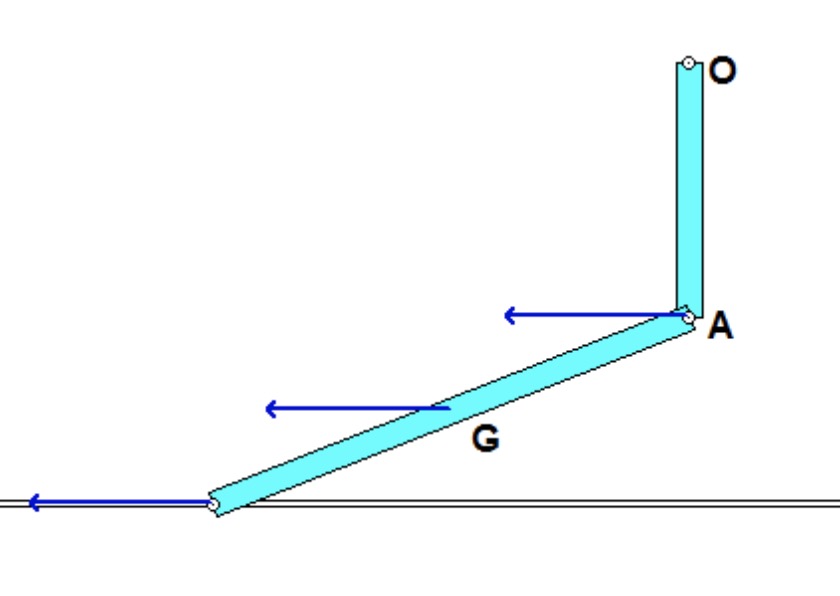
QUESTION: Where is the instant center (IC) of AB for the position above? What are the consequences of this location for ICAB? Can you see these in the above image when you consider the relative sizes of the speeds of points A, G and B?
HINT: As always, we should follow the four-step plan for solving this problem.
STEP 1: FBD. We will be using the work/energy equation to determine this angular speed. Based on earlier recommendations, we will make the choice of our system BIG, including both bars together.
STEP 2: Kinetics (here, work/energy). The total kinetic energy of the system shown in your FBD above is that of the bar OA + that of bar AB. For bar OA, it is recommended that you choose the fixed point O as your reference point for the KE. For bar AB, it is recommended that you choose the center of mass G for the reference point for its KE. Be sure to identify the datum line for the gravitational potential energy, and use this in writing down this potential. What is the work done by force F?
STEP 3: Kinematics. Locate the IC for bar AB. What does this say about the angular speed of AB? Use this result in solving your energy equation.
STEP 4: Solve
In the final position (when OA is vertical), can we assume the angular velocity of bar AB is zero, or must we derive its velocity relative to end A using the Instantaneous Center of Rotation?
Because of the IC being infinity, we can use omega_AB = 0.
Would the non conservative work component be treated as positive since point B is displaced in the negative x direction along with the force acting on it being in that direction? I want to make sure I’m applying the work sign convention correctly.
Yes, that is correct.
Should we count a normal force on both the top and bottom of the slot B in our FBD, or can this just be consolidated into one normal force pointing upwards?
I believe you can define a single normal force either up or down since you don’t know for sure which side of the slot is contacting point B. I personally defined a single normal force vector at B going upward.
how do we find the potential energy of disk_AB if we dont know how far down its COM has gone?
At position 2, bar OA is vertical. This allows you to find the angle theta that bar AB makes with the horizontal. It’s center of mass will be at a height of (2L/2)*sin(theta) above the horizontal surface on which B moves.
For bar OA, why is it recommended to use the fixed point O for the KE and not the center of gravity, which is used for bar AB?
I used point O for bar OA since it’s a fixed point, so OA undergoes pure rotation about O, which means it only has kinetic energy in the form 1/2 * I_O * w^2.
You typically have a choice between using either the center of mass or a fixed point as the reference point for the KE.
* Note that if you use a fixed point, then the general expression for KE which has three terms reduces down to a single term.
* If you use the center of mass, the expression for KE reduces down to two terms.
The expression using the fixed point, therefore, is simpler than that for the center of mass.
Is this problem possible/plausible without using instant centers? Can you just use the velocity equation with more difficulty, or is it necessary for me to see the instant center method on the exam?
If you use kinematics to relate the velocities of A and B then you’ll find that they are both constrained to move in the i direction. From this you’ll be able to tell that any non-zero angular velocity crossed with the position vector between A and B will yield velocity in the j direction, meaning w_ab has to be zero.
Another way that I found helpful to find w_ab = 0 was by drawing lines perpendicular to the motion of A and B as the theory of instant centers suggest. Once you draw these you will quickly see that since both of these lines are parallel the instant center must be at infinity and when this is the case the angular velocity (w_ab in this case) must be zero.
What helped me for this problem was using work-energy for both bars together and using the constraint at B to link the motions.
Would the mass of this problem be m = (200/32.3)?
Yes since mg is given in pounds, dividing by 32.2 ft/s^2 since that is the acceleration of gravity in feet will give you the m you need for step 4.
Since v_A = v_B and w_AB = 0 at this instant, so we only need to use one velocity variable correct?
Hello! I’m a little confused about how to find the angle AB makes with the horizontal in position 2. There’s no description of the total distance between the pin at O and the guide and I’m unsure about how to find this angle without such information. thank you!