| Problem statement Solution video |
DISCUSSION THREAD
Ask your questions here. Or, answer questions of others here. Either way, you can learn.
DISCUSSION and HINTS
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
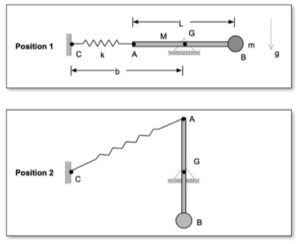
Draw a single free body diagram (FBD) of the bar and the particle.
Step 2: Kinetics (Work/energy)
- Looking at your FBD above, which forces, if any, do work that is not a part of the potential energy of the system? If there are none, then energy is conserved.
- Write down the individual contributions to the kinetic energy from the bar and particle, and add together for the total kinetic energy of the system.
- Define your gravitational datum line. Write down the individual contributions to potential energy from the bar, particle and spring, and add together for the total potential energy.
Step 3: Kinematics
Use the following rigid body kinematics equation to relate the angular velocity of the bar to the velocity of the particle B at position 2:
vB= vG + ωAB x rB/G
Step 4: Solve
From your equations in Steps 2 and 3, solve for the angular velocity of the bar.
Does the spring start unstretched? Also, there are equations online to account for masses on the end of rods in terms of the mass moment of inertia. This contribution would essentially take the transnational term of kinetic energy (V_b) and put it into the mass moment of inertia equation, correct?
It says in the problem statement that when the bar is in the horizontal position (position 1), the spring is unstretched.
Do not complicate the problem by bringing in equations that might be found somewhere online. Simply rely on the fundamentals. For this problem, T = T_bar + T_B, where:
T_bar = 0.5*(M*L^2/12)*omega^2
T_B = 0.5*m*v_B^2
and in STEP 3: Kinematics, you have: v_B = 0.5*L*omega
Let me know if this is not clear.
This is more so out of my own curiosity. Could it be possible to solve this with an observer/as a moving reference frame problem? Like, could the spring be considered a non-rigid body? Though I could be thinking of it wrong. It just might be an interesting alternative
I am not sure what you are asking here. The moving reference frame material that we have covered in this course has been strictly on kinematics. This is a problem on kinetics. Even on Step 3 of the kinetics problem there is not really any need to use MRF work.
Could you explain a little more on what you mean with your question?
I think you need to use work energy in this question where the T1 =0 but T2 would be 0.5 . m . IG^2. The Ig would be the sum of the IG bar and IG particle.
I’m pretty sure the IG is just that of the bar because the T contribution of the bar is not affected by the particle.
I believe that IG would include both the bar and the particle. The bar’s inertia term should stay the same, but the particle still adds to the total IG since the particle is rigidly attached and the whole system rotates about G.
Please read the discussion above about writing down the kinetic energy T.
Can you simply account for the particles I and add it to the energy equation instead of solving for its tangential velocity?
Yes, since B is a point mass (particle), its moment of inertia about G is I_B = m (L/2)^2
PLEASE follow the suggestions above to write down the KE as the sum of that for the bar added on to the KE for the particle. The KE of the bar is 0.5*(1/12)*M*L^2*omega_AB^2, and the KE of B is 0.5*m*v_B^2. That is all that you need to remember. No tricks involved.
Would the work/energy equation simplify to T_2 + V_2 = 0?
That depends on where you place your datum for gravitational potential energy.
Would the normal force be considered non conservative (should we put it in the WE equation)?
About which normal force do you ask here?
Since the assembly rotates about G, should T_2 = 1/2 I_G w^2? Are we assuming the particle at B is rigidly attached so it contributes m(L/2)^2 to I_G? Or should we include the particle as part of T_2?
As argued above, keep it simple. Write down the contribution to KE for each individual body and add together those components. In this case, the KE for the rigid bar can be written as 0.5*(1/12)*M*L^2,*omega^2 and the KE for the particle is 0.5*m*v_B^2. In Step 3 you will write down v_B = (L/2)*omega.
The intended approach is to split the kinetic energy into two parts, with bar: (1/2)I_G*omega^2 and particle: (1/2)m*v_B^2, and then use kinematics: v_B = (L/2)*omega to solve for omega.
For anyone checking their work (or who approached it differently), you can also treat the bar + particle as a single rigid body rotating about G and write: T = (1/2)I_total*omega^2, where I_total = (1/12)ML^2 + m*(L/2)^2.
This gives the same result, since the m*(L/2)^2 term accounts for v_B = (L/2)*omega.
So the instructor method is the intended way, but this can be a useful check or alternate way to organize the same terms.
This “alternate” way of setting up the KE works nicely if the system made up of the bar and particle has a fixed point.
If the system does not have a fixed point, then you need to proceed with extreme caution. In that case, you must first locate the center of mass of the bar and particle combined. Then, you can use this center of mass for the composite as your reference point in setting up the KE.
As you are learning new material, it is not advisable to use “tricks” in problem solving. It is too easy to incorrectly apply the trick where it should not be used.
Let me know if you have any questions on this.
This is kinda a general question for these problem types, but is spring force always potential energy, or is there any case where the spring force should be included as work instead since its a problem I often find myself making.
The general answer for this course is that the influence of springs on the response via work/energy is best done through potential energy rather than through work.