| Problem statement Solution video |
DISCUSSION THREAD
Any questions??
Discussion and hints:
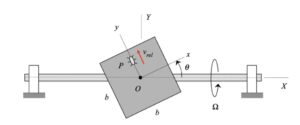
Your first decision on this problem is to choose your observer. Since an observer on the plate will have the simplest view of the motion of the insect, attaching the observer to the plate is recommended. Also, attach your xyz-axes to the plate.
Next write down the angular velocity and angular acceleration of the plate. Based on what we have been doing up to this point in Chapter 3, hopefully it is clear that the plate (and observer) has two components of angular velocity: Ω about the fixed X-axis and θ_dot about the moving z-axis. Take a time derivative of the angular velocity vector to find the angular acceleration of the plate (observer).
Following that, determine the motion of the insect as seen by the observer on the plate.
Use these results with the moving reference frame kinematics equation to determine the velocity and acceleration of the insect.
Is it correct to assume that V_o is 0 since it is on both axis of rotation?
It is a correct observation that v_O = 0 since O lies on the rotation axis for the horizontal shaft.
Is it correct to assume that I=i in this case but J≠j and K≠k because it only states information about theta and not the orientation of j or k? Or should it be based off the picture where the planes are all lined up?
As the figure show, i_hat and I_hat are aligned when theta = 0, as well as j_hat and J_hat being aligned. Therefore, k_hat and K_hat are also aligned.
Would we want to take theta dot in the negative direction in this question? I just assumed that maybe the block is spinning towards theta = 0 (This would imply negative theta dot), but then I guess its also possible that the block spins all the way around with +ve theta dot to theta = 0? So what do we take here, either way the answer is similar and I’d just have to flip some signs
The problem statement says that theta_dot is positive. Therefore, the angle theta is INCREASING in time at a constant rate. It does not reverse itself in direction at any point in time.
Because the axes are aligned at the moment provided by this problem, I converted all calculations to the XYZ system to make calculations easier and answers consistent in both velocity and acceleration (the answer does not specifically request xyz or XYZ).