| Problem statement Solution video |
DISCUSSION THREAD
Not collected.
Low frequency: ω < ωn
As expected, the response is in-phase with the base motion. Can you see this?
High frequency: ω > ωn
As expected, the response is 180° out-of-phase with the base motion. Can you see this?
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Can I solve this problem by putting an observer on the cart and describing the motion from that reference point first, and then put an observer on the ground and describe the motion of the whole cart?
I think just having the observer on the ground would simplify this process rather than what you proposed. I think performing your suggested idea would work, but it was just be a lot more complicated and more steps.
Yes. Thinking from the cart’s perspective first helps because the spring deformation depends on how the block moves relative to the cart, not just how it moves relative to the ground. Then you can switch back to the ground perspective to describe the actual motion of the block.
That said, you can do either, but staying in the ground frame the whole time is usually cleaner. Using the cart frame first can help visualize spring deformation, but you have to be careful to convert acceleration back to the ground frame correctly.
Yeah, I think you can, as long as you’re careful that the cart frame is accelerating. You’d probably want to use the relative motion y = x – x_b first, then convert back to the ground frame using x = y + x_b. The main thing is not to forget the base acceleration term when switching reference frames.
Would this be easier using work energy then doing a time derivative to find the eom, or just using newton euler?
Using work-energy can work, but I think you still need to take the time derivative to get the EOM after writing the kinetic and potential energy terms. So it is not really skipping steps. Newton-Euler is usually easier here since you can directly write the force and moment equations and use the no-slip condition, especially with the moving base x_B(t).
I would stick with using the Newton/Euler formulation in deriving the EOM.
Does the amplitude of the base’s oscillation vary based on whether the system is in or out of phase? It seems that it does not based on the start of my calculations.
No, the amplitude of the base doesn’t depend on the phase of the base. The base’s motion is bsinwt, so it’s amplitude is always just b, no matter how the system is moved. I guess if you wanted to know what does depend on phase- the BLOCK’s amplitude and the forces in the springs do depend on the BASE’s phase, yes. This because the system being in phase or out of phase changes how the block moves relative to the base!
I don’t know if it’s just me but when I click the link, it goes to HW6K instead of L. The previous post is also linked to K, not L.
is it valid to assume that the center of mass of the whole system is staying in one spot for this question since there are no external forces acting on it?
The moveable base is given a prescribed displacement in time. This means that there is a net force acting on the system, and, as a result, the center of mass is not fixed.
Even for the whole system, it might not be valid to assume the center of mass stays fixed as the motion XB(t) is prescribed by an external source. So I guess there is an external input acting on the system.
Not really. The base motion x_b is prescribed, which means something external is forcing the base to move. So there is an external input to the system.
is it better to describe the motion from the ground frame the whole time, or can we first use a reference frame attached to the cart and then convert the motion back to the ground frame?
You can do either, but staying in the ground frame the whole time is usually cleaner. Using the cart frame first can help visualize spring deformation, but you have to be careful to convert acceleration back to the ground frame correctly.
Ground frame is probably simpler since x is already measured that way. A cart-attached frame also works, but you have to include the cart’s acceleration when converting back. Otherwise it’s easy to miss a term.
I think it is ok to descibe the motion relative to the ground because the motion of the cart is prescribed so the only thing the cart’s position determines is the spring force.
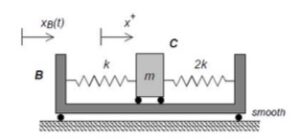
When writing out the spring forces, should I put that each spring’s deformation is based on the relative displacement x−xB, or should I just use the block displacement x?
For the springs deformation it should be (x-x_B) because its for the change in x, and since the base also moves, the change in x of the spring would be x-x_B.
For the specific solution here for the EOM how do I exactly write out the spring deformation? Also for the last part how do I properly write out the frequencies without making more mistakes?
For the spring deformation, just use relative displacement. I think one of the comments already here outlines a tip on how to do that in more detail. Both springs are attached to the moving base, so each one stretches based on how far the block is from the base. That means each deformation is the block position minus the base position.
For the frequencies part, I plugged in the assumed sin solution, solved for amplitude A, then set the magnitude of A equal to 2b. When you solve that, you’ll get an absolute value equation, which has a positive or negative solution and is why you end up with 2 diff frequencies. I think one of them is the freq below resonance and the other one is the freq above resonance.
Can we assume no friction between the cart and mass m as well as between the cart and ground?
Yes, it looks like no friction can be assumed based on the “smooth” indication as well as the small wheels on the cart and the mass.
Are you supposed to relate the force Xb to block C by LIM? Or are you just able to say that it acts completely on C because you treat block C and base B as the whole system? I guess my question is how you find the effect that Xb has on C?
I don’t think we need LIM here. The effect of XB(t) on the block C comes through the springs, which depend on (x-xB). So it doesn’t act directly on C, but is part of the spring forces’ equation.
How do you know that it is (x-xB)? I know you can swap the terms and redraw the FBD to mathematically get the same answer, but why is your first instinct (x-xB)?
You don’t really relate x_b to C using LIM. x_b is a prescribed displacement input, not a force. You find its effect through the spring stretch. Since the base moves by x_b and block C moves by x, the spring deformation depends on their relative motion, like x – x_b. That relative stretch creates the spring force on C.
Is there a friction force between block C and the base B? I drew an FBD for base B but I am not sure what the mass of the base is so I can’t complete the EOM.
Smooth, just like between B and ground (each moves on rollers).
When solving this problem, it’s stated that the ground surface is frictionless/smooth. Do we know if there exists friction between object B and C (or the wheels of C)? AKA is object B also a frictionless/smooth surface?
There is not friction between object B and C. Similarly to B and the ground, the wheels on the bottom of object C indicate that there is no horizontal friction force resisting the rolling motion of the block relative to the base.
I would say you can assume that Object B’s surface is also frictionless/smooth. That’s what I did. It’s because it doesn’t explicitly state that Object B has a rough surface, so it’s implicitly assumed to be frictionless. That means the only horizontal forces on C come from the springs.
I found it helpful to express the spring forces in terms of the relative displacement (x−xB), so everything is written in a consistent coordinate before forming the equation of motion.
I agree, I believe that choosing to consistently use (x-xB) every time and then decide if its positive or negative is the way to go. It allows for the least amount of confusion.
When given a problem containing two points hitting the surface, is it best to model the system with one normal force or two normal forces? I would like to simplify my FBD but don’t want to include simplifications that may not be valid.
For the kinetics of this problem, we only have to sum forces in the x direction so the normal force does not matter. If the springs were in the y direction on the block then the normal force would have to be considered.
Is it safe to say Xb only has an affect on x and not x double dot
Physically, the behavior of the system is changed significantly by xb. Mathematically, xb still has an effect on x double dot regardless of it not being multiplied by it since x** + … = xb. However, I believe xb is only ever added or subtracted to x double dot, not multiplied or divided.
I found it helpful to write the spring deformation in terms of the relative displacement (x-x(B)), because the base is moving. This made the forcing term easier to solve and helped keep everything consistent when forming the equation of motion.
When forming the equation of motion for this system, I understand that the spring deformation should be written in terms of the relative displacement since the base is moving. I need help understanding the physical interpretation of this concept. The system experiences “forced” movement through the spring when base motion exists but how do I treat this base motion according to their equation of motion. The phase behavior we observe depends on how ω behaves with respect to w(n) because it establishes two distinct states of observation.
I may be misunderstanding the question but the way I interpreted the motion was to focus mainly on the walls of the base and C, and pretended the main body of the base C rests on is the ground. The system analyzed should only consist of C, and in the x direction the base only acts upon C through the spring, which require using x-xB. The base motion should be just xB=bsin(omega*t).
How should the spring deformations be written when the base moves as xB(t)=bsin(ωt)? I’m confused whether the forces on block C should depend on x, xB, or the relative displacement x−xB, especially since the right spring is also attached to the moving base.
I believe that the forces on block C should depend on the relative displacement x−xB. This is because the only 2 forces in the x direction are the 2 spring forces as we assume friction is not involved. The spring deformations and forces should be written as k(x-xB). I found it helpful to view the walls of the base the springs are attached to on their own and ignore the main body fo the base.
Why is friction not treated as a time-varying function?
Sorry, wrong discussion thread^
How do we calculate two positive angular frequencies that output double the base amplitude? If we set the coefficient of the particular solution equal to 2*b, we can solve for one positive omega, but how do we derive the second one?
Because the base motion is prescribed, we can assume a steady state response xp(t) = Asin(wt) and use this to substitute directly into the EOM. This lets you express xdot and x doubledot in terms of sin(wt) and cos(wt) allowing you to solve for A.
I understand that x is the displacement of block C, but I am a little unsure how to write the spring stretches since both spring supports move with base B. For the left spring, would the deformation be x−x_B, while for the right spring it is also affected by the base motion because the right wall is attached to B?
Should I always assume (x-xb) for positive displacement when encountering questions similar to this one? Under what senario would this change?
For part d, which asks us to plot A vs. ω, should we be able to sketch amplitude response plots like this on exams, or is this type of plotting mainly for conceptual understanding in homework? If we need to match a solution equation to a graph, what are the key features we should look for?
So if the spring is pushed to the left and the positive x direction is to the left, it would be positive to the right? Or does it depend on our convention?