| Problem statement Solution video |
DISCUSSION THREAD
Ask and answer questions here. Help others with thoughtful responses to their questions. You will learn from the experience.
DISCUSSION and HINTS
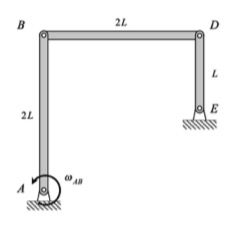
This mechanism is made up of three links: AB, BD and DE. You are given the rotation rate of link AB, and are asked to find the angular velocities and angular accelerations of links BD and DE. At the position shown, it is known that ωAB = constant.
From the animation below, we are reminded that B and D move on circular arc paths with centers at A and E, respectively. The velocities of B and D are always perpendicular to the lines connecting the points back to the centers of the paths. Can you visualize the location of the instant center (IC) of link BD as you watch this animation? For the position of interest in this problem, you see in the animation that the velocities for all points on BD are the same – is this consistent with the location of the IC for BD at that position?

Velocity analysis
Where is the instant center of link BD? What does this location say about the angular velocity of BD?
Acceleration analysis
Write a rigid body acceleration equation for each of the three links in the mechanism:
aB = aA + αAB x rB/A – ωAB2rB/A
aD = aE + αDE x rD/E – ωDE2rD/E
aB = aD + αBD x rB/D – ωBD2rB/D
Combining together these three vector equations in a single vector equation will produce two scalar equations in terms of αBD and αDE.
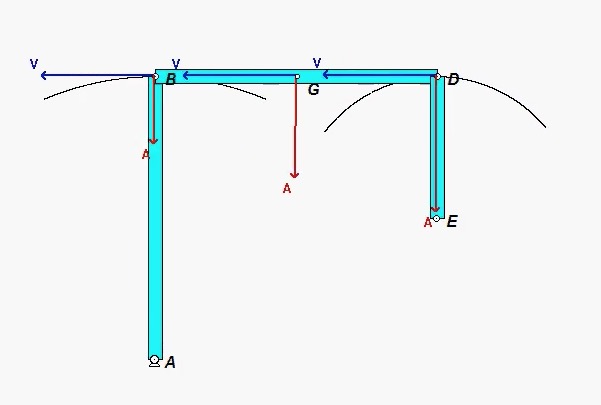
Shown below is a freeze-frame of the motion of the mechanism at a time corresponding to the instant on which this question is based. As can be seen the velocity for all three points on link BD are the same (in both magnitude and direction) This is consistent with the conclusion that you would make based on knowing that the IC for link BD is at infinity for this instant where AB and DE are parallel.
Should angular velocity be in terms of omega_AB?
Yes, leave your answers in terms of omega_AB.
When the animation shows the bar being at the far left and the velocities of B and D are not colinear I see where the instant center of link BD is, but how would I solve for it at the instant given when the velocities are on the same line and therefore the perpendicular corresponding lines would never touch? I think that when the velocities are on the same line the angular rotation is supposed to be zero because its just translation, but I can see in the animation that link BD is not experiencing pure translation.
In short, is there another way to solve for the instant center without the lines?
I think this means that the instant center is at infinity and the link therefore has no angular velocity
I’m confused as to how to prove that the angular accelerations are zero, at least I think they should be from the animation.
I’ve tried writing the acceleration formulas but end up with -w_AB^2 i = – alpha_DE i – alpha_BD j
If you look at YOUR equation, the j_hat components say that:
alpha_BD = 0
and
alpha _DE – omega_AB^2
I would re-check your algebra on this to make sure that these equations are correct, however.
Why do you think that all of the angular accelerations should be zero? My logic on this says that the angular acceleration for DE should be zero but the angular acceleration for BD should NOT be zero.