Is it possible for all the points on the disk to have a acceleration but have the angular acceleration of the disk be 0? That doesn’t make sense in my head.
Take a look at the rigid body acceleration equation:
a_B = a_A + alpha x r_B/A – omega^2*r_B/A
The contributions to the acceleration of point B comes from three places: from the acceleration of the reference point A, a term resulting from angular acceleration and a term resulting from angular velocity. From that, we see that any point on the rigid body can have a non-zero acceleration even if the angular acceleration is zero.
One simple example of all points having non-zero acceleration would be a rigid body in pure translation (a_A ≠ 0 and omega = alpha = 0).
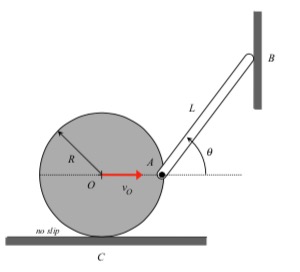
I got a negative i and positive j component for acceleration of point A but from the animation it looks like it should only be a negative i component at the point of interest. I also went on to get a negative alpha_AB. I think this is wrong.
Consider the acceleration of point A referenced back to point O:
a_A = a_O + alpha_d x r_A/O – omega_d^2*r_A/O
Since O is traveling on a straight path at constant speed, then a_O = 0. Also, since O has a constant speed, then alpha_d = 0. What is left on the RHS of this equation?
a_A = – omega_d^2*r_A/O
From this, we see that the acceleration of A points in the negative x-direction (no y-component).
Since we know that all points in a rigid body have the same angular velocity and angular acceleration, does this mean that the disk and the bar have the same angular velocity and acceleration? Because point A is part of both the disk and bar?
I don’t think this reasoning is correct but I’m not sure why. Where am I going wrong?
I don’t think they are the same because we should be able to find 2 different equations for Va and Aa for the 2 bodies. Woa = Woc and @_oa = @_ oc since they’re on the same body.
Actually, points do NOT possess angular velocities and angular accelerations. Rigid bodies do.
Just because two rigid bodies share a common point does not mean that they have the same angular velocity or angular acceleration. In this case, they do not because the two bodies are able to rotate with respect to each other due to the pin joint at A.

Is it possible for all the points on the disk to have a acceleration but have the angular acceleration of the disk be 0? That doesn’t make sense in my head.
Take a look at the rigid body acceleration equation:
a_B = a_A + alpha x r_B/A – omega^2*r_B/A
The contributions to the acceleration of point B comes from three places: from the acceleration of the reference point A, a term resulting from angular acceleration and a term resulting from angular velocity. From that, we see that any point on the rigid body can have a non-zero acceleration even if the angular acceleration is zero.
One simple example of all points having non-zero acceleration would be a rigid body in pure translation (a_A ≠ 0 and omega = alpha = 0).
Let me know if I am not answering your question.
I got a negative i and positive j component for acceleration of point A but from the animation it looks like it should only be a negative i component at the point of interest. I also went on to get a negative alpha_AB. I think this is wrong.
Consider the acceleration of point A referenced back to point O:
a_A = a_O + alpha_d x r_A/O – omega_d^2*r_A/O
Since O is traveling on a straight path at constant speed, then a_O = 0. Also, since O has a constant speed, then alpha_d = 0. What is left on the RHS of this equation?
a_A = – omega_d^2*r_A/O
From this, we see that the acceleration of A points in the negative x-direction (no y-component).
Does this help?
Since we know that all points in a rigid body have the same angular velocity and angular acceleration, does this mean that the disk and the bar have the same angular velocity and acceleration? Because point A is part of both the disk and bar?
I don’t think this reasoning is correct but I’m not sure why. Where am I going wrong?
I don’t think they are the same because we should be able to find 2 different equations for Va and Aa for the 2 bodies. Woa = Woc and @_oa = @_ oc since they’re on the same body.
Actually, points do NOT possess angular velocities and angular accelerations. Rigid bodies do.
Just because two rigid bodies share a common point does not mean that they have the same angular velocity or angular acceleration. In this case, they do not because the two bodies are able to rotate with respect to each other due to the pin joint at A.