Also, when calculating vE = vectorvC + omega(EC) x r(e/c) would it come out to be zero since both of the terms in the cross product are in the k direction
For the acceleration part, I get that link AB is rotating at a constant rate, so its angular acceleration is zero. But I’m still confused about how point B can have acceleration if the angular acceleration is zero. Could you explain how we should account for that when finding the angular accelerations of links BE and CE?
Please note two things: B has a non-zero speed and B moves on a circular path. With those two observations, B will have a centripetal component of acceleration of v_B^2/r in the negative x-direction. If alpha_AB were NOT zero, then B would also have a component of alpha_AB*r in the y-direction in addition to the centripetal component of acceleration. These interpretations are based on what we learned on the second day of class when we covered the path description of kinematics.
The good news is that you do not need to have remembered this in order to work the problem. Use the rigid body kinematics equation of the following in your analysis:
a_B = a_A + alpha x r_B/A – omega_AB^2*r_B/A
This equation contains the path information on acceleration described above.
How to solve the acceleration problem? Write down a rigid body kinematics equation for each of the three links. Use these three vectors equations together to produce two scalar equations for the two unknowns of the problem (alpha _BE and alpha _CE).
In general, which units should we leave our answer in, given units or meters?
Your answers should be in terms of ft/s and ft/s^2.
Shouldn’t answers end up in rad/s and rad/s^2. You convert back from the Cartesian to the rotation around the other link, right?
My goof. I should have read the question more closely.
Yes, the units should be rad/s and rad/s^2.
Thanks for correcting this.
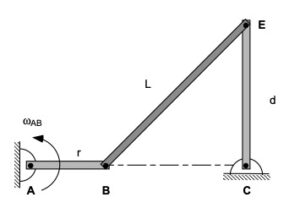
Since EC is vertical, does that mean that the horizontal distance from BE is still .3? I am having trouble visualizing the problem.
Yes. The right triangle BCE is a 3-4-5 right triangle. With L = 0.5 ft and d = 0.4 ft, then the distance between B and E is 0.3 ft.
Also, when calculating vE = vectorvC + omega(EC) x r(e/c) would it come out to be zero since both of the terms in the cross product are in the k direction
For the acceleration part, I get that link AB is rotating at a constant rate, so its angular acceleration is zero. But I’m still confused about how point B can have acceleration if the angular acceleration is zero. Could you explain how we should account for that when finding the angular accelerations of links BE and CE?
Please note two things: B has a non-zero speed and B moves on a circular path. With those two observations, B will have a centripetal component of acceleration of v_B^2/r in the negative x-direction. If alpha_AB were NOT zero, then B would also have a component of alpha_AB*r in the y-direction in addition to the centripetal component of acceleration. These interpretations are based on what we learned on the second day of class when we covered the path description of kinematics.
The good news is that you do not need to have remembered this in order to work the problem. Use the rigid body kinematics equation of the following in your analysis:
a_B = a_A + alpha x r_B/A – omega_AB^2*r_B/A
This equation contains the path information on acceleration described above.
How to solve the acceleration problem? Write down a rigid body kinematics equation for each of the three links. Use these three vectors equations together to produce two scalar equations for the two unknowns of the problem (alpha _BE and alpha _CE).