| Problem statement Solution video |
DISCUSSION THREAD
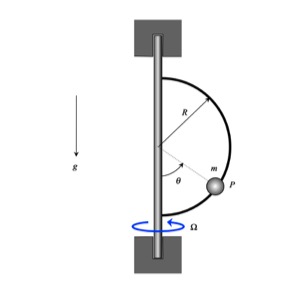
Please note that since P is not sliding on the rotating guide, P is traveling along a horizontal circular path having a radius with the radius r being the perpendicular distance from P to the vertical shaft. It is recommended that you use a set of polar coordinates: er pointing outward from the vertical shaft to O; eφ tangent to the above-described path of P; and, k pointing upward.
Use the Four-Step solution plan outlined in the lecture book:
Step 1 – FBD: Draw a free body diagram of P. With the guide being smooth, there will be only two forces acting on P: the weight and the normal force N from the rotating guide.
Step 2 – Kinetics (Newton): Resolve the forces in your FBD into their polar components. Sum forces in the r-direction and set equal m*ar. Sum forces in the k-direction and set equal to 0 (since P has no vertical motion for all time).
Step 3 – Kinematics: Use the polar kinematics descriptions of the acceleration of P. Note that r is constant for all time and Ω is constant.
Step 4 – Solve. With the above equations you will have sufficient number of equations to solve for the unknowns in the problem, which includes N and θ.
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
I am a little confused on how I am supposed to get the acceleration for this question. The no slide condition means that the particle shouldn’t move tangentially but the only force I have in that direction is part of the gravity but that can’t be equal to zero.
With the particle not sliding along the rotating guide, the path of P is a horizontal circle, with the radius being the perpendicular distance from P to the rotation axis of the vertical shaft.
Our recommendation is to make a sketch of this path from the top view. If you use a polar description, then e_hat_r points outward on the circle and e_hat_phi is tangent to the circle.
Your question is about the acceleration of P. Write down the general expression of the acceleration of a point using the polar description. In this expression, use r_dot = r_ddot = 0, along with phi_dot = Omega and phi_ddot = Omege_dot = 0.
Does this help?
If I made a sketch from the top view I don’t quite understand why e hat theta is tangent to the circle as theta is defined from the front view.
Sorry, I used theta for two different things. I meant to say that the polar coordinates are r and phi (instead of r and theta). I have corrected my wording in the above hints.
Apologies for the confusion.
I’ve applied what you mentioned above by describing the motion of the particle P in polar coordinates but as seen from above. From the acceleration formula, some terms are zero and will cancel out, and so far I’ve gotten that only the ehat_r component remains, which is likely the centripetal acceleration of Particle P about the shaft. Now what do I do with the information at hand to determine the angle theta? I can’t seem to relate the acceleration of Particle P with its weight mg as both of those components are perpendicular to one another.
nvm it seems figuring out the FBD does help, and the normal force acting on Particle P due to the guide is actually on an angle to the weight mg, hence now i can relate the terms to one another
I found it really helpful to remember that the radius of the circular path is r = R sin theta before jumping into the radial acceleration equation. It makes the substitution much cleaner when solving for the angle.
If we assume the guide is smooth, the normal force must be perpendicular to the path, which also means N must always point directly toward the center of the semi-circle. If so, does the vertical component of N (N cosθ) have to perfectly balance the weight mg for the particle to stay at a constant height?
Always rely on your kinetics to tell you the answers. What you say above does come directly from summing forces on P in the vertical direction.
Why does r = Rsin(theta)? I’m having trouble visualizing this when r isnt actually a real value.
P is traveling on a horizontal circular path. The radius of this path is the perpendicular distance from P to the rotation shaft. From the figure you can see that this perpendicular distance is given by R*sin(theta).
Not sure what you mean when you say that r = R*sin(theta) is not a real value.
Does this help?