| Problem statement Solution video |
DISCUSSION THREAD
Any questions??
Discussion and hints:
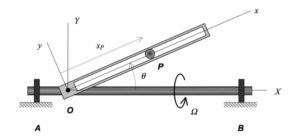
Your first decision on this problem is to choose your observer. Since an observer on the tube will have the simplest view of the motion of the particle P, attaching the observer to the tube is recommended. Also, attach you xyz-axes to the tube.
Next write down the angular velocity and angular acceleration of the tube. Based on what we have been doing up to this point in Chapter 3, hopefully it is clear that the tube (and observer) has two components of angular velocity: Ω about the fixed X-axis and θ_dot about the moving z-axis. Take a time derivative of the angular velocity vector to find the angular acceleration of the tube (observer).
Following that, determine the motion of the particle P as seen by the observer on the tube.
Use these results with the moving reference frame kinematics equation to determine the velocity and acceleration of the particle P.
For the acceleration of point O, would we establish this as some sort of centripetal acceleration similar to the example with the tank we did in class today? Or rather, since it’s pinned to the tube and rotating about the fixed X axis, would it be 0? Thanks!
Point O in this problem is on the rotation axis for AB. Therefore, point O does not move. It has neither velocity nor acceleration.
I was wondering it says to answer in xyz I thought usually the goal was to answer in XYZ if it doesnt specify should we assume it means XYZ and also for the gradescope submission when you assign pages to submit this homework it says H and G instead of I and J.
In general, you can choose either ijk components or IJK components. Here it specifically asked for ijk components.
I will check with the TAs on the Gradescope submission.
The X component can be translated to x through x = costheta i – sintheta j. Substitute this into the equations for w and alpha. This works for all times, then use theta = 60 for the instant.
With the observer attatched to the tube (x-axis), the particle P will have a (Vp/o)rel = xp_dot and a (Ap/o)rel = 0. I found it very helpful to make sure you have the relative motion established before going into the heavy math.
For my problem solving for this question, I found it helpful to convert all of my input vectors to the acceleration equation to the xyz coordinate system using the provided angle so that I would not have to convert my final answer from XYZ to zyz.
I was wondering would it be easier terms wise if we chose the observer to be on shaft AB.
There are advantages (and disadvantages) to either choice.
The observer on the fixed shaft simplifies the omega and alpha calculations but complicates the visualization of the relative velocity and relative acceleration terms. Having a non-zero angle between the two sets of unit vectors complicates further the relative velocity and relative acceleration terms
The observer on the arm complicates the omega and alpha terms but simplifies the visualization of the relative velocity and acceleration terms.