| Problem statement Solution video |
DISCUSSION THREAD
Since the motion of P is being described here in terms of polar variables of r and θ, it is recommended that you use a polar description for your forces and acceleration.
Use the Four-Step solution plan outlined in the lecture book:
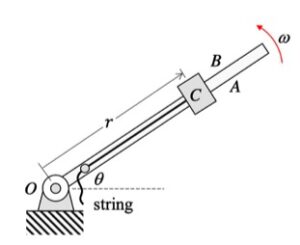
Step 1 – FBD: Draw a free body diagram of C. NOTE: The arm rotates about a vertical axis, meaning that the arm moves in a horizontal plane; that is, the gravitational force acts perpendicular to the plane of the paper.
Step 2 – Kinetics (Newton): Resolve the forces in your FBD into their polar components. Sum forces in the r-direction and set equal m*ar. Sum forces in the θ-direction and set equal to m*aθ
Step 3 – Kinematics: Use the polar kinematics descriptions of ar = r_ddot – r*θ_dot^2 and aθ = r*θ_ddot + 2*r_dot*θ_dot.
Step 4 – Solve. When solving for the normal force, N, acting on C take note of the sign on your answer. What does this sign mean in terms of answering Part (c)?
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
For part c, paying attention to the sign of the normal force makes it easy to figure out which side the block contacts.
Since the Normal force is negative does that mean the block makes contact with side A?
If the sign in the answer for your normal force ends up being negative, that means that the direction that you originally assumed for the normal force in your FBD was incorrect. That is, if you assumed contact with side A, then a negative sign on the normal force in your answer means that the contact is actually with side B. And vice versa.
How to tackle this problem without knowing thetha ? Give that the r and thetha components of mg are -mgsin(thetha) and -mgcos(thetha) respectively
Please note that the arm rotates about a vertical axis. This means that the arm moves within a horizontal plane; that is, gravity acts perpendicular to the page. The influence of the weight force does not depend on the angle of the bar.
Are we considering the magnitude of normal force due to all forces? Or just in the plane we are working in?
Either answer is fine.
In this question, we do not need to include the weight force in any of our calculations, right?
As mentioned above, the arm rotates about a vertical axis. This means that the arm moves within a horizontal plane; that is, gravity acts perpendicular to the page.
In class I believe you mentioned we could submit this homework tomorrow (I hope I heard correctly), will the deadline for the homework be changed on Gradescope?
The due date/time has been updated for all sections on Gradescope.
Should our answers for the tension and normal force be vectors?
Not necessary.
Can we assume that theta dot squared is just equal to omega due to the angle not affecting the position relative to O on the vertical axis? How would this problem change if the arm rotated about the horizontal axis?
Correct. omega is equal to theta_dot.
As stated, the problem can be solved using the polar description for the kinematics. In your hypothetical case of adding on a second component of rotation about a fixed horizontal axis, we would then need to use the MRF formulation for the kinematics.
I found that solving for the acceleration first made this problem much faster to solve.
For this particular problem, it is possible to solve for the acceleration with the given information.
For most problems that we will be solving, that will not be the case. The kinetics and kinematics are coupled together and you need to solve those equations simultaneously together. In general, it is best to write down the Newton equations from the FBDs (Step 2), followed by the kinematics (Step 3). The reasoning is that for more complicated problems you will not know what kinematics that you need until after you write down your Newton equations.
Just a thought.
When calculating the normal force, I get a negative number for a_theta. Does a negative sign automatically mean the block is hitting Side B?
The negative sign on the answer for the normal force says only that the direction for the force that you assumed when you drew your FBD was incorrect – it is pointing in the opposite direction from that which you assumed. As discussed above, if you assumed contact with side A, then it is actually in contact with B. And, vice versa.