| Problem statement Solution video |
DISCUSSION THREAD
Any questions??
Discussion and hints:
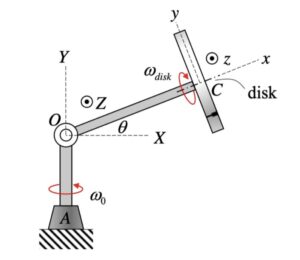
The disk shown above has TWO components of rotation (note that ω0 = 0):
- a rotation rate of θ_dot about a fixed axis (the “+” K-axis), and,
- a rotation rate of ωdisk about a moving axis (the “-” x-axis)
(Be sure to make a clear distinction between the lower case and upper case symbols.)
Therefore, the angular velocity of the disk is given by:
ω =θ_dot* K – ωdisk i
The angular acceleration vector α is simply the time derivative of the angular velocity vector ω : α = dω/dt. In taking this time derivative,
- Recall that the K-axis is fixed. Since K is fixed, then dK/dt = 0.
- Recall that the i-axis is NOT fixed. Knowing that, how do you find di/dt?
Does theta-dot not also contribute to the angular velocity of the disk? I noticed it was not included in the formula posted in the discussion/hints and I am unsure as to why.
It appears that the hints provided were based on a different set of parameters. That set of parameters had omega_0 ≠ 0 and theta_dot = 0. The version of the problem here is for omega_0 = 0 and theta_dot ≠ 0.
I will modify the hints to align them for the later version described above.
I used theta’ as part of the total angular velocity of the disk as the summation of theta’ and omega disk.
Wouldn’t we need to know the distance between O and C in order to find di^/dt
di_hat/dt = omega x i_hat
The distance from O to C is not involved in that calculation.
The given says the shaft is on a fixed vertical axis. Referring to the hint, why is omega_0 rotating about the K axis instead of the J axis?
Please note that omega_0 = 0 according to the problem statement.
There was a typo in the discussion points above in that the component of rotational velocity about the K-axis is theta_dot, not omega_0. That has now been fixed.
Should we assume that the alpha_disc is in the same direction as the angular velocity?
That would not be a good assumption to make.
In this problem, as well as all problems in this section, you need to first write down the angular velocity (omega) of the rigid body that is being asked. This omega vector will likely have components about more than one axis: some axes will be fixed; some axes will be rotating. You need to take this into account as you take the derivative of omega to find the angular acceleration of the body.
As stated in the Discussion above, this disk has two components of rotation: theta_dot about K_hat and omega_disk about negative i_hat . K_hat is fixed, and i_hat is moving.
Can we assume alpha disk is in the same direction as omega disk? I understand that total angular acceleration is given by the derivative of the summation of angular velocities, however, alpha disk specifically I thought referred to the angular acceleration of the disk itself about its axis at C. Therefore, I assumed the angular acceleration of the disk was specifically increasing the magnitude of angular velocity of the disk about point C.
No. The angular velocity of the disk has two components: theta_dot about K_hat and omega_disk about -i_hat.The angular acceleration has a component in the direction of omega x i_hat.
For this question, are the Z axes pointing in or out of the page?
All coordinate systems in this course are to be defined by the right-hand rule: i_hat x j_hat = k_hat.
When finding the derivative of the unit vector i, is the angular velocity used the angular velocity of the entire thing or just the angular velocity of arm OA
You should start out each problem by defining to which rigid body your moving xyz-axes are attached. In this case, you would choose the disk. Then, for example, d(i_hat)/dt = omega x i_hat, where omega is the angular velocity of your xyz-axes.
For W_disk isn’t it rotating in the + x direction based on the arrow, in the hints it mentions the -x direction. also would it be on the X axis instead of the lowercase x axis since theta = 0?
For the first question, it is rotating in the negative x-axis: curl the fingers of your right hand in the direction shown in the figure. Your thumb will point in the negative x-direction.
For the second question, yes, at this instant i_hat = I_hat. However, when you take the time derivative of omega to find alpha, you need an expression for omega that is valid for ALL time. The direction of the omega_disk tracks the x-axis, NOT the fixed X-axis. Therefore, prior to taking the derivative we need to distinguish between the moving i_hat axis and the fixed I_hat axis.
Let me know if this is not clear. Good question, though.
I curled in the direction of the loop and got that my thumb points in the rightward direction (+x axis)
Wait never mind i didn’t realize the red line was in front of the bar not behind it, apologies
The fingers of your right hand are curled over the top of the shaft. This puts your thumb pointing toward O, which is in the negative x-direction.
Since omega_0 = 0, can we assume that omegadot_0 = 0?
Yes, omega_0 is zero for all time. Therefore, omega_0_dot = 0.
I’m confused why there are two omega disks? Like they give angular velocity of disk = 2 rad/s, but then part a asks you to determine the angular velocity of the disk? I understand there’s a difference between omega total and omega disk, but why do we call them the same thing?
As the problem description states, omega_disk is the name given to the angular speed of the disk relative to arm OC. That is only one component of the angular velocity of the disk. The angular velocity of the disk is the vector sum of the angular velocity of arm OC with the angular velocity of the disk relative to the arm.
If the name omega_disk is confusing, feel free to give it a different name.
for di_hat/dt = omega i_hat, is that the magnitude of the omega found in part a or not the magnitude and the vector omega found in part a?
When finding the time derivative of a unit vector, you take the cross product of the angular velocity vector omega with the unit vector. Since the cross product involves two vectors, then omega must be a vector, not a magnitude.
The omega in the theta direction would have a fixed z direction. For differentiation, the theta double dot term would go to zero, leaving an answer in the x and y directions only.
The capital Y and Z terms will be equivalent to the y and z terms as they are in line with the instant. The w0 and w distk dot term in the acceleration would go to zero as they are constant.
It’s clear that the coordinate systems are aligned correct? Will it be given to us that the coordinate systems are aligned or will we just have to think about it intuitively?
I’m a little confused about the signs on w_disk and w’_disk. The problem gives them as 2 and 5. Based off of the diagram, w_d is in the negative x-axis. However, we don’t know if w’_d is in the same clockwise direction or if it’s actually positive. When plugging in, should I use -w_d in the i direction and +w’_d in the i direction?
As you state here, the disk is rotating about OC in the negative x direction with an angular speed of omega_disk, making a contribution of -2*i_hat to the omega vector. That number omega_disk is INCREASING at a rate of 5 rad/s^2. This would correspond to a contribution of -5*i_hat to the alpha vector.
When coordinate systems are given like this, should we still define them on paper?
You should use the coordinate systems that are provided to you in the problem.