| Problem statement Solution video |
DISCUSSION THREAD
Any questions??
Discussion and hints:
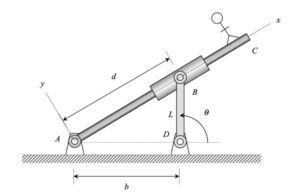
Let’s first take a look at the motion of point B. This motion of B is shown in the simulation results below.
The motion of B is circular, with the center of the path located at point D. This is expected since link BD is pinned to ground at point D.
Now, let’s attach an observer to link AC. Keep in mind that this observer is unaware that they are moving. The motion of B that this observer sees is straight, with this straight path aligned with the collar sliding on link AC. Since the xy-axes are attached to AC, this relative motion is in the x-direction:
(vB/A)rel = vrel i = d_dot i
(aB/A)rel = arel i = d_ddot i
where d_dot and d_ddot are unknowns (you will solve for these in your analysis). You can see this is the following animation shown from the perspective of the observer attached to link AC.
Do we have to put the answers in vector form?
That would be excellent.
In the discussion/hints section, it says that (v_B/A)rel = v_rel i = d_dot i and (a_B/A)rel = a_rel i = d_ddot i. From the view of the observer, could the same be true for (v_D/A)rel and (a_D/A)rel?
I just realized I looked at the setup incorrectly, my bad
does v_b have both i and j components? Because of where the coordinate system is defined, it only has velocity in the i direction but relative to the observer it should have both components right?
i figured it out!
Just the opposite. The observer sees velocity directed along only the x-axis, whereas the velocity as seen by a stationary observer has components in both x and y. You can see this in the two animations above.