| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the “Leave a Comment” link above.
Discussion
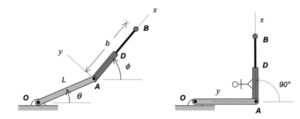
An animation from the simulation of the motion of the robotic arm system is shown above for a fixed observer. The motion of end-effector B is quite complicated, as can be seen. However, if we attach an observer to section AD of the end link of the arm, the observed motion of B is greatly simplified. In fact, the observer simply sees a back-and-forth motion of B in the x-direction, as shown in the animation below.
HINTS: The velocity of point B can be found from the following moving reference frame velocity equation:
vB = vA + (vB/A)rel + ω × rB/A
With the observer on link AD, we know the following:
vA = (L θ_dot) i
ω = φ_dot k
(vB/A)rel = b_dot i
Use similar logic for writing down the acceleration of B. Be careful in writing down the expression for aA ; in particular, aA ≠ 0. (A is traveling on a circular path with a constant speed.)
In the acceleration equation for B, I am confused on whether to use phi dot or the sum of phi dot and theta dot for omega. Could you explain which one is correct and why?
The value of omega that is to be used in these moving reference frame equations is the angular velocity of the OBSERVER. It is strongly recommended that you place the observer on link AD since that gives a simpler view of the motion of end B (straight line motion).
With the observer on AD, the angular velocity of the observer is the time derivative of the angle that defines the orientation of AD which is phi. Therefore, if you place the observer on AD, use phi_dot*k_hat for omega.
Does this help?
Confused on if I am missing something. One of the hints gives us a way to solve for vb but i never used it afterwards? is finding vb actually needed or am i missing something?
It is possible that on an earlier assignment of the problem the “find” included the velocity of B along with the acceleration of B.
For the acceleration of a attached to O would the should all of the omegas and alphas be in terms of a and o, which would make the overall calculation easier?
In these observer and linkage problems, are we supposed to give our final velocity and acceleration vectors in terms of the observer’s axis or the “global” axis?
Either is fine. We ask that all components of the vector answers be given in terms of the same set of unit vectors (that is, do not mix the observer and fixed unit vectors in the same answer).