| Problem statement Solution video |
DISCUSSION THREAD
Any questions??
Discussion:
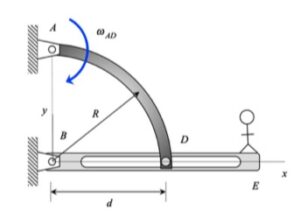
Let’s first take a look at the motion of point D. This motion of D is shown in the simulation results below.
The motion of D is circular, with the center of the path located at point A. This is expected since link AD is pinned to ground at point A.
Now, let’s attach an observer to link BE. Keep in mind that this observer is unaware that they are moving. The motion that this observer sees is straight, with this straight path aligned with the slot cut into link BE. You can see this is the following animation shown from the perspective of the observer attached to link BE.
Do we have to assume Omega_AD is in the negative k direction? I assumed my ddot is in positive i and i come out with a positive value for ddot in terms of omega_AD. This doesn’t seem correct because D moves to the left in the animation.
It is not an “assumption” that omega_AD is negative, it is “given”. So, definitely write that angular velocity vector in the -k_hat direction.
I agree: ddot should be negative. That means that you made an error in your algebra. Let me know if you cannot find the error.
I am getting a positive value for the angular velocity of BE, which is contrary to what the animation shows, and I cannot figure out what I am doing incorrectly.
I would need to see your work in order to help out on this. Did you set omega_AD as a negative value when writing down it as a vector in the kinematics equation?
Should the values of d_dot and d_doubledot be given as vectors?
No. Those are scalar quantities.
Is d equal to the radius of the circle (R) and is the distance from A to be also R at the particular instance we’re solving for?
The distance from A to B is a constant value of R. The distance d (from B to D) varies with position; however, d = R at the position of interest.