Any questions?
Discussion and hints:
Shown above are animations of the response of this system from simulations performed with the exciting frequency omega being 0.5*omega_n and 1.5*omega_n. Note that for 0.5*omega_n the response is in-phase with the base motion x_B(t), whereas for 1.5*omega_n the response is 180° out-of-phase with the base motion. This phase difference should be apparent from both the visualization of the motion, as well as from the plots provided for x(t) and x_B(t). Can you observe this difference?
Derivation of the EOM: the four-step plan
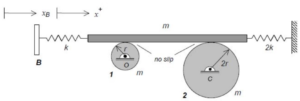
- FBD: Define a coordinate x that represents the displacement of the block as measured from its position when the springs are unstretched. Draw a free body diagram (FBD) of the block. In doing so, take care to get the directions of the spring forces correct, and that the force in the spring on the left depends on the relative motion between B and the block. Also, draw the FBDs of the disks. Define some rotation coordinates, one for each disk.
- Newton/Euler: It is recommended that you use Euler's equations for the disks, choosing their centers as the reference points. Use Newton's second law for the block.
- Kinematics: You will need to relate x_ddot to the angular accelerations of the disks. Be sure to get the signs correct on these as you look back over your definitions of rotation coordinates in Step 1.
- EOM: Combine the kinetics equation from Step 2 with the kinematics from Step 3 to arrive at the single differential equation of motion for the system in terms of the x coordinate.