Microrobots armed with new force-sensing system to probe cells
October 13, 2014
 |
|
This image shows a "microforce-sensing mobile microrobot" juxtaposed against a U.S. penny. The device is being developed at Purdue University (Purdue University photo) |
WEST LAFAYETTE, Ind. – Inexpensive microrobots capable of probing and manipulating individual cells and tissue for biological research and medical applications are closer to reality with the design of a system that senses the minute forces exerted by a robot's tiny probe.
Microrobots small enough to interact with cells already exist. However, there is no easy, inexpensive way to measure the small forces applied to cells by the robots. Measuring these microforces is essential to precisely control the bots and to use them to study cells.
"What is needed is a useful tool biologists can use every day and at low cost," said David Cappelleri, an assistant professor of mechanical engineering at Purdue University.
Now researchers have designed and built a "vision-based micro force sensor end-effector," which is attached to the microrobots like a tiny proboscis. A camera is used to measure the probe's displacement while it pushes against cells, allowing a simple calculation that reveals the force applied.
 |
|
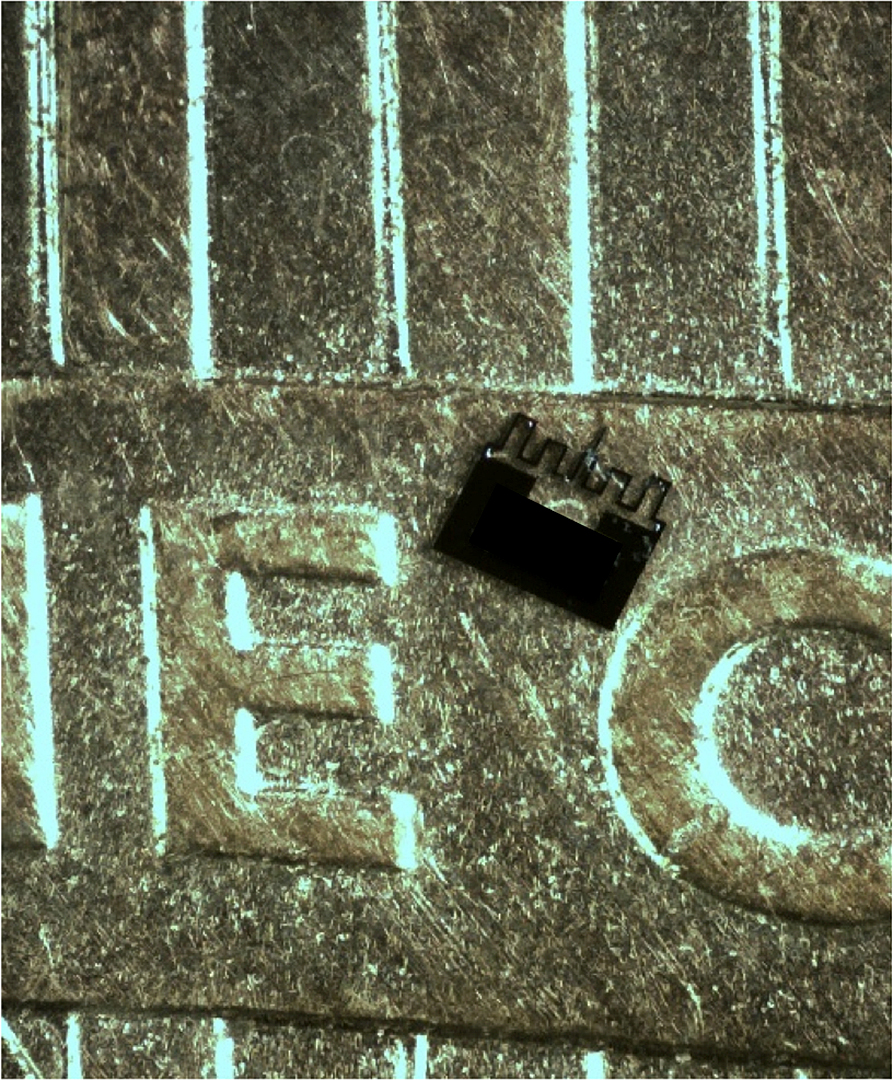
This is a side view of the microrobot next to a U.S. penny. (Purdue University photo) |
The approach could make it possible to easily measure the "micronewtons" of force applied at the cellular level. Such a tool is needed to better study cells and to understand how they interact with microforces. The forces can be used to transform cells into specific cell lines, including stem cells for research and medical applications. The measurement of microforces also can be used to study how cells respond to certain medications and to diagnose disease.
"You want a device that is low-cost, that can measure micronewton-level forces and that can be easily integrated into standard experimental test beds," Cappelleri said.
Microrobots used in research are controlled with magnetic fields to guide them into position.
"But this is the first one with a truly functional end effector to measure microforces," he said.
Current methods for measuring the forces applied by microrobots are impractical and expensive, requiring an atomic force microscope or cumbersome sensors with complex designs that are difficult to manufacture. The new system records the probe's displacement with a camera as it pushes against a cell or tissue. Researchers already know the stiffness of the probe. When combined with displacement, a simple calculation reveals the force applied.
Findings were detailed in a research paper presented during the International Conference on Intelligent Robots and Systems in September. The paper was authored by postdoctoral research associate Wuming Jing and Cappelleri.
The new system combined with the microrobot is about 700 microns square, and the researchers are working to create versions about 500 microns square. To put this scale into perspective, the mini-machine is about one-half the size of the "E" in "One Cent" on a U.S. penny.
"We are currently working on scaling it down," he said.
Future research also may focus on automating the microrobots.
The system was fabricated at the Birck Nanotechnology Center in Purdue's Discovery Park. The research has been supported by the National Science Foundation. Information about the research is available at http://multiscalerobotics.org/
Writer: Emil Venere, 765-494-4709, venere@purdue.edu
Source: David J. Cappelleri, 765-494-3719, dcappell@purdue.edu
ABSTRACT
Incorporating In-situ Force Sensing Capabilities in a Magnetic Microrobot
Wuming Jing and David J. Cappelleri
Purdue University
This paper presents the preliminary design of a microforce sensing mobile microrobot. The design consists of a planar, vision-based micro force sensor end-effector, while the microrobot body is made from a nickel magnetic layer driven by an exterior magnetic field. With a known stiffness, the manipulation forces can be determined from observing the deformation of the end-effector through a CCD camera attached to an optical microscope. After analyzing and calibrating the stiffness of a micromachined prototype, manipulation tests are conducted to verify this microrobot prototype is indeed capable of in situ force sensing while performing a manipulation task. This concept can be scaled down further for next generation designs targeting real biomedical applications on microscale.

{kind=link}
{kind=link}